|
2023年7月30日,南極熊獲悉,,來自巴斯夫加州研究聯(lián)盟 (CARA)和加州大學圣地亞哥分校 (UC)的研究團隊革命性地改進了軟體機器人技術(shù),。研究人員 Yichen Zhai、Albert de Boer,、Martin Faber,、Rohini Gupta 和 Michael T. Tolley 已成功在嵌入流體控制電路的桌面 3D 打印機上制造出一款整體軟機器人設(shè)備,。該項目使用熔絲制造 (FFF) 技術(shù)和Ultrafuse TPU材料來構(gòu)建創(chuàng)新的夾具,這種材料組成保證了人們使用時的安全性,。

Press-Photo-Ultrafuse-Flexible-Filaments.jpg (11.14 KB, 下載次數(shù): 84)
下載附件
2023-7-30 20:05 上傳
這項研究的完整細節(jié)可以在《科學機器人》最近發(fā)表的封面文章中找到,,標題為“Desktopfabrication of monolithic soft robotic devices with embedded fluidic controlcircuits/具有嵌入式流體控制電路的單片軟機器人設(shè)備的桌面級制造”。
屏幕截圖 2023-07-30 200115.jpg (168.41 KB, 下載次數(shù): 79)
下載附件
2023-7-30 20:05 上傳
與依賴氣動驅(qū)動和涉及手工模塑/組裝的制造方法的傳統(tǒng)軟機器人相比,,這些新設(shè)備采用 3D 打印制造,,減少了手工工作的需要,并允許創(chuàng)建更復雜的結(jié)構(gòu),。
FFF 打印的軟機器人遇到的一個常見挑戰(zhàn)是它們的高有效剛度和潛在的泄漏,,這可能會限制它們的功能。為了解決這些問題,,研究人員提出了一種巧妙的設(shè)計來生產(chǎn)柔軟,、防漏的氣動機器人設(shè)備,在打印過程中將流體控制組件嵌入致動器中,。他們實現(xiàn)了更柔軟的執(zhí)行器,,可以彎曲形成一個完整的圓圈,以及能夠控制高壓氣流的打印氣動閥,。
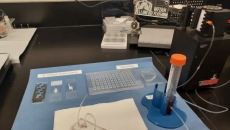
該團隊進一步將這些執(zhí)行器和閥門結(jié)合起來,,創(chuàng)建了一個無電子的自主夾具。該設(shè)備的非凡之處在于,,它是在一個連續(xù)的 3D 打印工作流程中生產(chǎn)的,,該工作流程持續(xù)了 16 小時 19 分鐘。最終產(chǎn)品無需后處理,、組裝或維修——確保了高度的可重復性和可訪問性,。
相同的制造策略可以擴展到具有嵌入式傳感和控制電路的其他氣動裝置。關(guān)鍵設(shè)計規(guī)則包括使用單個連續(xù)刀具路徑(稱為歐拉路徑)進行打印,,以及創(chuàng)建具有超薄壁的結(jié)構(gòu),。這導致了低剛度結(jié)構(gòu),與硅膠模制部件相當,。
生產(chǎn)的夾具在打印后即可立即使用,,具有自動拾取和釋放物體的能力。它可以使用類似的桌面3D 打印機輕松復制,,這使其成為制造業(yè)和農(nóng)業(yè)等各個行業(yè)的有吸引力的工具,。
grippers-780x470.jpg (48.58 KB, 下載次數(shù): 96)
下載附件
2023-7-30 20:05 上傳
巴斯夫和加州大學圣地亞哥分校之間的合作不僅產(chǎn)生了創(chuàng)新的制造方法,還建立了新的設(shè)計規(guī)則,,從而產(chǎn)生了高性能,、氣密性良好的自主氣動裝置。這一進步預示著軟機器人技術(shù)的新時代,,復雜的定制機器人可以在單一的整體打印過程中設(shè)計和生產(chǎn),。
|  收藏
收藏 轉(zhuǎn)播
轉(zhuǎn)播 支持
支持 反對
反對








 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351