|
���x���ᵽ�C���˕r,���˂�ͨ�����뵽�S�����������(zh��n)���Ӱ��C-3PO֮�����,�������^ȥ10���ܛ�C���˵ĸ�����F(xi��n)��,���@�N�C����ʹ�ÿ՚��ˮ�����w,���Լ���ܛ���`��IJ���,���c���y(t��ng)Ӳ�C���˲�ͬ,��ܛ�C���˾����˙C�����İ�ȫ��,��߀���M�и��죬����ץסС�����w����Џ��s���Π�֮Ė|��,��
�����R���m��W�ͼ��ݴ�W��������У,������(n��i)��÷¡��W�W������PolyJet�@�N3D��ӡ�������چδδ�ӡ�����������ȫ�������w�·��ܛ�C����,���@�N�C������������3D���w�·Ԫ��������,�����w���O�ܡ������]�����w�ܺ;��Ўο��{(di��o)�������湦�ܵġ����_�����w�ܣ���푑����w���y(t��ng)�����̖,��������ֱ�� (DC)��,��������(AC)����߀����ͨ�^�A���̣�����׃��������M�Р�B(t��i)�{(di��o)��(ji��),��

�D 1 PolyJet 3D ��ӡ�y(t��ng)һܛ�C����ϵ�y(t��ng)���OӋ�������������,�������چδδ�ӡ����ȫ��.jpg (183.06 KB, ���d�Δ�(sh��): 92)
���d����
2021-7-16 07:33 �ς�
��PolyJet 3D��ӡܛ�C����ϵ�y(t��ng)���چδδ�ӡ�м������w�·,��( A ) ģ�K��3D CADģ�ͺ����w�·Ԫ��,�����w���B��ܛ�����ͽY(ji��)���⚤���������·��̖,����B��������ȫ���ɵ����w��ʎ���·�Ľy(t��ng)һܛ�C���˵�CADģ�ͺ�������ģ�M�·�D,��(C ) ʹ�Ï��ԣ���ɫ�������ԣ���ɫ����ˮ����֧�Σ��Sɫ�����϶����PolyJet 3D��ӡܛ�C���˵ĸ���D,��( D ) PolyJet 3D��ӡ�^�̵�����ӕr�D��,�������ߣ�5����,��( E��F) ��ȥ��֧�β���֮ǰ��֮��(F) ���м������w�· (E) �Ľy(t��ng)һ�����ܛ�C���˵�����Y(ji��)��,�������ߣ�2����,���DƬ��Դ��Ruben Acevedo,���R���m��W���˷�У��
�о��F�ʹ����Stratasys��PolyJet3D ��ӡ�CObjet500 Connex3,���Լ�SolidWorksܛ����ģ�������w��·Ԫ��,��ܛ��(zh��)�������˿ںͼ���ܛ�C����ϵ�y(t��ng),����ʹ����3�NStratasys���a(ch��n)�IJ����M�д�ӡ������ - MED610�����Թ��ܲ���
- Agilus30�����Թ�ۺ������
- SUP706��ˮ���Ԡ���֧�β���
�D 3 ���ں�����ܛ�w�C����?sh��)Ĺ���ԭ���͌��Y(ji��)��,��.jpg (536.29 KB, ���d�Δ�(sh��): 127)
���d����
2021-7-16 07:33 �ς�
�����ں�����ܛ�w�C����?sh��)Ĺ���ԭ���͌��Y(ji��)������A��F��ܛ�C���˵ĸ���D,�����ɵ����w��ʎ���·,���Լ������ڻ��ں���ݔ��l����������Ҫ��B(t��i)��ģ�M�·�D��(G ) �ھ��д����ԵIJ������g���ں㶨�����l�� (10 ml/min) ��ܛ�C���˹��ܵČ��Y(ji��)��,��������,��3���ס��DƬ��Դ��Ruben Acevedo,���R���m��W���˷�У,����H���ں㶨�����l���£�10 ����/��犣���ÿ��ܛ�(q��)��֫�w�Ěwһ����ֱ׃���S�r�g���������Y(ji��)��,���{ɫ����֫,���tɫ,����֫��au,�������λ,��
�ܵ������W�Ć��l(f��)���F��Ԟ�����ģ��������3�N���в�ͬ�������w�·��ܛ�C����,�����������IJ��������M���о�,��ᘌ���ͬ���y(t��ng)���̖���@Щ���w�·ܛ�C���˿ɷ֞�������� - �ں��� [��ֱ��(DC)��] ݔ��l����ܛ֫�a(ch��n)��������,�������(q��)��
- ���ò�ͬ�����������Ե�Ƕ��ʽ���w���w��,�������� [������� (AC)��] ���wݔ��l���®a(ch��n)����������Ӿ�\��
- ���Æ��A���̷������ԣ�����׃�����������ݔ�룬ͨ�P�������R��W�ֵܡ���һ�P�ď��ԙCе��
�D 4 ��������ݔ���ܛ�w�C���˞���?sh��)Ĺ���ԭ���͌��Y(ji��)��,��.jpg (349.73 KB, ���d�Δ�(sh��): 110)
���d����
2021-7-16 07:32 �ς�
����������ݔ���ܛ�w�C���˞���?sh��)Ĺ���ԭ���͌��Y(ji��)��,����A��D����������ݔ��l���ͺ㶨ݔ����ķN��Ҫ��B(t��i)�ĸ���D��ģ�M�·�D�� (E ) ����Y(ji��)��,��������,��2 ���ס��DƬ��Դ��Ruben Acevedo,���R���m��W���˷�У,����F��ܛ��(zh��)�������P������֫λ�ƵČ��Y(ji��)����(G)�ں㶨ݔ�����0.1 Hz ���l�ʏ� 0 �� 80 kPa ��ʎ������ݔ���µ�����֫λ��·���� DIC ̎�팍�Y(ji��)��,���{ɫ�ͼtɫ�քe��ʾ�cͨ؛��Û��ͨ؛�o�s���P��λ������,��
�ڈFꠄ�(chu��ng)����ܛ�C�����У��о��ˆT�J����ں�����ܛ�C���˞������m��������^ʹ�ò�ͬ���w��·��ܛ�C���˅���ģ��,��������ʎ�О�Ҳ�c�������P�īI����О�һ��,��ᘌ��Cе�֣��F꠳ɹ�������������w���w�܌��F(xi��n)��ָ�\�ӿ���,��ͨ�^������׃��,����ָ���M�в�ͬ�\�ӣ��Ķ������Α���������o����Ȥ����,���о��ˆT�����@һ���c��ʹ�þ��̿���,������ˌ��r�Α�������ɹ�ͨ�P�����R��W�ֵܵ�һ�P,��
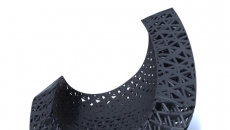
�D 5 ���м������w�·���A����,�����ڷ����������wݔ���ܛ�Cе�ֵĸ���ͽY(ji��)����.jpg (746.74 KB, ���d�Δ�(sh��): 120)
���d����
2021-7-16 07:32 �ς�
�����м������w�·���A����,�����ڷ����������wݔ���ܛ�Cе�ֵĸ���ͽY(ji��)��,����A��D�����ڲ�ͬ���ȵ��ķN��Ҫ��B(t��i)�ĸ���D��ģ�M�·�D����E��F��ܛ�C������ָ���Y(ji��)��,��������,��2 ���ס��DƬ��Դ���R���m��W���˷�У��Kristen M. Edwards,��Jennifer Landry ��Ryan D. Sochol,����G��ܛ�C������ָ-���w���w��ϵ�y(t��ng)���`���ʾ SD,��( H ) PolyJet 3D��ӡ�^�̵�����ӕr�D��,�������ߣ�2 ����,���DƬ��Դ��Joshua D.Hubbard,���R���m��W���˷�У����I�������Y(ji��)��,��������,��2����,����Ƭ��Դ���R���m��W���˷�У�� Joshua D. Hubbard ��Kristen M. Edwards,��( J�����푑��A���̌��r�����R��W�ֵ�ҕ�l�Α�ĵ�һ�P���Y(ji��)������ע���������������B(t��i),���Α��B(t��i)��ʹ�ÿ�������ܛ�Cе�ֈD��,����������ʾ�r�g�c,����Ƭ��Դ���R���m��W���˷�У��Joshua D. Hubbard��Ruben Acevedo ��Kristen M. Edwards,��
�о��Y(ji��)������,�����w�·���Գɞ�һ�N������ֶ�����ܛ�C���˵������ԣ��M���p�ٺ�/�������c���y(t��ng)���w���Ʒ������P�����`,����3D��ӡҲ���C���܉�?q��)��F(xi��n)�چδδ�ӡ�����������ȫ�������w�·��ܛ�C����ϵ�y(t��ng),��ͬ�r���Ԅӻ�PolyJet3D��ӡ��ˇ���������췽��p���˞�����a(ch��n)�����`��,������,��3D��ӡ���g��ʹ�ü������о��ˆT��ܛ�C�����I���̽�����Ķ����W�Ʊ������о��OӋ�ṩ��һ�l��;����
�����īI��Hubbard, J., Acevedo, R.,Edwards, K., Alsharhan, A., Wen, Z., Landry, J., Wang, K., Schaffer, S. and Sochol, R., 2021. Fully 3D-printed soft robots with integrated fluidiccircuitry. Science Advances, 7(29), p.eabe5257.
|










 �ղ�
�ղ� �D(zhu��n)��
�D(zhu��n)�� ֧��
֧�� ����
����
 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351