2022��4��9�գ��ϘO�ܫ@Ϥ���¼��¿Ƽ��c�O(sh��)Ӌ��W(xu��)(SUTD) �_�l(f��)��һ�N����������ʽҺ�w3D��ӡ(FL-3DP)���g(sh��)���·��������Դ�ӡ�����ܸ���(qi��ng)����(f��)�s��ܛ�ԙC(j��)���˽M����

3.jpg (120.57 KB, ���d��(sh��): 125)
���d����
2022-4-9 11:04 �ς�
������������(y��ng)��ˮ���z�����иߏ�(f��)�s�Ե�ܛ�ԙC(j��)���˵Ĺ���ܛ�M���M(j��n)��3d��ӡ���DƬ�����¼���SUTD
FL-3DP��һ�N���d���g(sh��)�����кܸߵĝ������Ɍ�(sh��)�F(xi��n)����Ϲ��ܽM����3D��ӡ�����������z�����R�r�Ҹ����|(zh��)��īˮ�����Ї��䲢�������m��(d��ng)?sh��)�λ�á�һ��īˮ���̣����z�Ϳ��Ժ�����ϴ����
�@�N�����˷���Ŀǰ3D��ӡ���g(sh��)�������ăɂ��y�}�����ȣ���Q��3D��ӡ�ڔD���r��Ҫ�^�L�r�g�������̵Ć��}����Σ���������б���īˮ���m(x��)Һ�B(t��i)�����������M(j��n)�Ď��Π������и߿v�M�ȵđҴ��Y(ji��)��(g��u)�Π���N���ϵľ���(x��)�M�ϣ��ѳɞ�һ�N�O(sh��)Ӌ���ܡ�
�����ڵ�FL-3DP���g(sh��)���J(r��n)�鹦��߀�����ƣ�ͬ�r���������(f��)�s�ĽM����ֻ�������һ���ϽY(ji��)��(g��u)�ε��Π�皤�;W(w��ng)��
�M���@�(xi��ng)���g(sh��)��ǰ���ܺã���ȱ������(f��)�s�Ę�(g��u)������(j��ng)�^�о����@���ֿ���ͨ�^�{(di��o)��(ji��)��ī��֧��֮�g�Ľӿځ팍(sh��)�F(xi��n)���Ķ�Ҫ����ߵĴ�ӡ�ֱ��ʡ�
2.jpg (100.85 KB, ���d��(sh��): 129)
���d����
2022-4-9 11:04 �ς�
��FL-3DP 3D��ӡ���g(sh��)����(sh��)�F(xi��n)ܛ�ԙC(j��)���˹��ܽM�����·������DƬ�����¼���SUTD
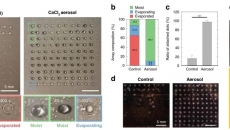
SUTD�ĿƌW(xu��)�҂�ͨ�^�����о�֧�����z����ī֮�g����׃���ܺͽ��淀(w��n)���ԣ�����˴�ӡ�ֱ��ʺͱ���ȡ��@һ�Y(ji��)�����Sʹ��FL-3DP���g(sh��)���켯�ɶ�N���ϵď�(f��)�s�����w�M�����M(j��n)����(f��)�s�Ď��Π
ԓ�о�����ACS Applied Materials & Interfaces�ڿ��ϰl(f��)�����c(di��n)�҂����T����
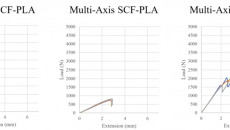
���ڙC(j��)���˵ľ��ܚ�ӽM�������ڙC(j��)����ܛ�ԊA�ߡ��@�Ǟ����f��FL-3DP�c���y(t��ng)���췽��(����ͺ��T��)��ȵă�(y��u)�c(di��n)��
ͨ�^����ܛ��Ӳ�����ԏ����w���о��ˆT�܉��(zh��n)�_���Ʋ������Π�׃�Σ�ͨ�^�̶�ܛ�A�߱����Ħ�����ṩ���й��܁��{(di��o)���书�ܣ��c���y(t��ng)�T���ͬa(ch��n)Ʒ��ȣ��㲿����ʹ�É�������˽�10����
1.jpg (127.88 KB, ���d��(sh��): 122)
���d����
2022-4-9 11:04 �ς�
�������ܛ�ԊA��3d��ӡ�Y(ji��)����ܛ�͈�(ji��n)Ӳ�ď����w���DƬ�����¼���SUTD
������֪���@�õ��@Щ�Y(ji��)����ȫ������ˆT��ͬŬ����һ���֣���(bi��o)־�����ڔD����3D��ӡ�M(j��n)���r�������M(j��n)��ķ������O(sh��)Ӌ�ˆT�����ˆT�ṩ�˸��V韵��O(sh��)Ӌ���g�����ЏV韵đ�(y��ng)��ǰ����
�¼��¿Ƽ��O(sh��)Ӌ��W(xu��)�о���ϯ�о��T����������Pablo Valdivia y Alvarado�a(b��)���������FL-3DP ���������ڔD���������������칤ˇ�����҂�Խ��Խ�ӽ���ȫֱ�ӹ������(f��)�s����ϵ�y(t��ng)������C(j��)���˺�������(f��)�s���ܮa(ch��n)Ʒ���O(sh��)�䣩����KĿ��(bi��o)����
Ŀǰ��ԓ�F(tu��n)�(du��)����Ŭ��ͨ�^���һ�N�µđҸ����|(zh��)��U(ku��)��ɼӹ����ϵķ������@�N�Ҹ����|(zh��)���c�����īˮ���ݡ�
| 








 �ղ�
�ղ� �D(zhu��n)��
�D(zhu��n)�� ֧��
֧�� ����
����
 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351