來源: EngineeringForLife
未來,,軟機器人有望實現(xiàn)金屬機器人完成的任務(wù)并能進一步擴大其應(yīng)用范圍。氣動執(zhí)行器在這一發(fā)展中發(fā)揮著重要作用,,因為它是構(gòu)建仿生運動系統(tǒng)中重要的一環(huán),。

640.jpg (13.56 KB, 下載次數(shù): 129)
下載附件
2024-2-18 09:30 上傳
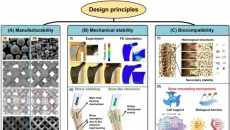
氣動邏輯門為控制壓力激活的軟機器人提供了強大的替代方案,這些機器人通常由金屬閥門和電路控制,。許多現(xiàn)有的完全兼容的氣動控制邏輯方法都存在高手動工作量和低壓力耐受性的問題,。為此,來自德國弗萊堡大學(xué)的F. J. Tauber/S. Conrad團隊設(shè)計了一種完全柔軟的熔融沉積建模(FDM)3D打印閥門結(jié)構(gòu),,可用作氣動邏輯門(PLG),。該團隊將其模塊的可配置性和合規(guī)性與增材制造設(shè)計和更高的耐壓能力結(jié)合起來。這種門的電路被證明可以控制無電子的復(fù)雜氣動系統(tǒng),。
640-1.jpg (34.7 KB, 下載次數(shù): 108)
下載附件
2024-2-18 09:30 上傳
本文要點:
(1)這項工作開發(fā)出一種3D打印的氣動邏輯模塊,,使用氣壓即可控制軟機器人的運動。所構(gòu)建模塊可以實現(xiàn)氣流的邏輯切換從而模擬電氣控制,;
(2)該方法提供了自動化的快速制造方法,、可修改性以及測試新PLG設(shè)計的簡便性。
總之,,這種澆口設(shè)計旨在通過消除手動制造和后處理的需要來簡化生產(chǎn),,標(biāo)志著朝完全無電子氣動控制電路邁出的重要一步,可以取代未來軟機器人中的復(fù)雜電氣元件,。
文章來源:
https://www.science.org/doi/10.1126/scirobotics.adh4060
|
上一篇:霍爾德森與伯明翰大學(xué)合作,開發(fā)增材制造難熔金屬和鎳鈦合金應(yīng)用下一篇:機器人輔助手術(shù)與3D打印模型的新時代
|


 收藏
收藏 轉(zhuǎn)播
轉(zhuǎn)播 支持
支持 反對
反對






 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351