來源:中科大
能夠在外界刺激下變形的智能材料在軟體機器人等領(lǐng)域擁有廣闊的應(yīng)用前景。其中,,鐵磁液晶彈性體具有多刺激響應(yīng)、多模式,、多功能的特性,,受到了研究人員的關(guān)注。然而,,目前缺乏一種可以針對其兩個功能域進行獨立編程的方法,,大大限制了其制造能力。
中國科學(xué)技術(shù)大學(xué)工程科學(xué)學(xué)院機器人與智能裝備所李木軍副教授課題組,,聯(lián)合近代力學(xué)系王柳特任教授以及南方科技大學(xué)劉吉副教授,,提出了一種鐵磁液晶彈性體的雙各向異性可編程3D打印方法,成功實現(xiàn)了液晶取向和磁化強度的獨立編程,,以及制件在不同外場刺激(熱,、光,、磁)下的可控多模式變形。該論文以"3D-printed ferromagnetic liquid crystal elastomer with programmed dual anisotropy and multi-responsiveness"為題發(fā)表于國際學(xué)術(shù)期刊《Advanced Materials》,。

640.jpg (56.08 KB, 下載次數(shù): 144)
下載附件
2024-2-21 14:41 上傳
640-1.jpg (85.12 KB, 下載次數(shù): 150)
下載附件
2024-2-21 14:41 上傳
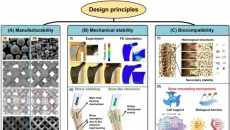
▲鐵磁液晶彈性體的可編程雙各向異性3D打印及其多模式變形
該論文在墨水直寫打印過程中通過外磁場和流動剪切實現(xiàn)鐵磁液晶彈性體中鐵磁域的磁化強度和液晶基元的取向,。通過控制磁場與打印速度的方向和大小,,分別實現(xiàn)了磁化強度和液晶取向的自由編程,。結(jié)果顯示,在加熱變形的同時,,鐵磁液晶彈性體仍擁有磁變形能力,,且表現(xiàn)出目前3D打印智能材料中最高的能量密度和響應(yīng)速度。在此基礎(chǔ)上,,研究人員制造了一系列能夠在不同外場順序下進行多模式變形的鐵磁液晶彈性體執(zhí)行器,,并通過調(diào)控液晶彈性體基質(zhì)的變形溫度實現(xiàn)了順序變形。
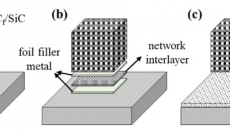
基于該技術(shù),,該工作展示了一個3D打印的鐵磁液晶彈性體帶狀機器人,,可以在不同的地形、溫度和磁場環(huán)境下,,以不同的模式運動,,表現(xiàn)出強大的環(huán)境適應(yīng)。此外,,研究人員還展示了基于鐵磁液晶彈性體的多穩(wěn)態(tài)力學(xué)超材料,。通過磁場和近紅外激光控制鐵磁液晶彈性體的變形,使超材料在不同穩(wěn)態(tài)之間切換,,進而在壓縮過程中展現(xiàn)出高度可調(diào)的力學(xué)性能,。
640-2.jpg (37.29 KB, 下載次數(shù): 193)
下載附件
2024-2-21 14:41 上傳
▲具有多變形能力和環(huán)境適應(yīng)性的3D打印鐵磁液晶彈性體帶狀機器人
本研究的結(jié)果表明,物理場輔助的3D打印可以大大拓寬以鐵磁液晶彈性體為代表的多功能域材料的制造與編程能力,,進而在不同外場刺激下實現(xiàn)可控的多模式響應(yīng),,對軟體機器人、柔性電子,、超材料等領(lǐng)域的發(fā)展起到推動作用,。
640-3.jpg (54.3 KB, 下載次數(shù): 164)
下載附件
2024-2-21 14:41 上傳
▲基于鐵磁液晶彈性體的多穩(wěn)態(tài)力學(xué)超材料
以上工作得到了國家自然科學(xué)基金、科技部國家重點研發(fā)計劃,、安徽省自然科學(xué)基金支持,。中國科學(xué)技術(shù)大學(xué)精密機械與精密儀器系孫宇軒博士是該論文的第一作者,中國科學(xué)技術(shù)大學(xué)李木軍副教授,、王柳特任教授,、張世武教授,南方科技大學(xué)劉吉副教授為共同通訊作者,。論文作者還包括中國科學(xué)技術(shù)大學(xué)彭晨暉特任教授,。
論文鏈接:https://doi.org/10.1002/adma.202302824
|


 收藏
收藏 轉(zhuǎn)播
轉(zhuǎn)播 支持
支持 反對
反對






 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351