|
2024��6��16��,���ϘO�ܫ@Ϥ,�����Ա����_���{������W(xu��)���о��ˆT�_�l(f��)��һ��������ܛҺ����(zh��)�����������ڿ��ƺ�Ȳ���һ����ܛ�C���˵�׃�κ��\��,���о��ˆT߀�C��,��ԓ���g(sh��)���c�Π�ӛ���������ʹ�ã�ʹ�Ñ��܉�(f��)��ܛ�C�����i���������Π�,��������(j��)��Ҫ�֏�(f��)��ԭʼ�Π�,��

1.jpeg (31.34 KB, ���d��(sh��): 185)
���d����
2024-6-16 21:52 �ς�
���͈�(zh��)�����(q��)�ӱ�����ܛ�C����,���DƬ��Դ�������_���{������W(xu��) Jie Yin
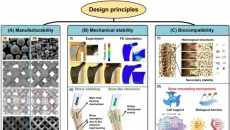
���P(gu��n)�о����}�顰�����Π�ӛ��Ч��(y��ng)��ȫ 3D ��ӡ��ܛҺ����(zh��)����������׃�κͲ�������Փ�ı��l(f��)���ڡ����M���ϡ��ڿ���,��ԓՓ���ɱ����_���{������W(xu��)ǰ��ʿ����ҫ�I(y��),�������_���{������W(xu��)��ʿ���о��T�wҫ������Լ������_���{������W(xu��)��ʿ���R���ܹ�ͬ����ԓ헹����õ����������ҿƌW(xu��)����� 2126072 �� 2329674 ̖�Y��,��
��Ļ�؈D 2024-06-16 214344.png (150.54 KB, ���d�Δ�(sh��): 196)
���d����
2024-6-16 21:53 �ς�
ԓՓ�ĵ�ͨӍ����,�������_���{������W(xu��)�Cе�c���պ��칤�̸����� Jie Yin �f������ܛ�C���˼��g(sh��)���S����(y��ng)���I(l��ng)���пɞ飬���O(sh��)Ӌ�(q��)��ܛ�C����СҎ(gu��)ģ�\�ӵĈ�(zh��)�����s�O������(zh��n)��,���҂��ķ����������۵Ķ���� 3D ��ӡ���g(sh��)���Π�ӛ���ۺ���턓(chu��ng)���߶ȵ�ܛ��(zh��)����,��ʹ�҂��܉���Ʒdz�С��ܛ�C���ˣ��Ķ����F(xi��n)��ɫ�Ŀ��ƺ;�����,�,���
�¼��g(sh��)��ه�������ɃɌӽM�ɵ�ܛ�C���ˡ���һ����ʹ�� 3D ��ӡ���g(sh��)��������Ծۺ���,�����������wͨ���D���������|(zh��)����؞�����ϵķdz�С�Ĺ���,���ڶ����������Π�ӛ���ۺ����,���������,��ܛ�C����ֻ�� 0.8 ������
adma202402517-fig-0001-m.jpg (239.38 KB, ���d��(sh��): 201)
���d����
2024-6-16 21:53 �ς�
���c SME ���������Π�׃�κ��Π��i����ȫ 3D ��ӡ�́�����ܛҺ����(zh��)���� (MSHA) ��ʾ��D
ͨ�^�����w�������wͨ��,���Ñ����Ԯa(ch��n)��Һ��,����ʹܛ�C�����ƄӲ���׃�Π���wͨ���ĈD��������ܛ�C���˵��\�Ӻ��Π�׃�������oՓ�Ǐ���,��Ť��߀������,�����⣬ע������w����ע���ٶȿ�����ܛ�C���˵��Ƅ��ٶȺ�ʩ�ӵ�����,��
����Ñ�ϣ�������Y(ji��)��ܛ�C���˵��Π�,����������ʩ���m�ȵğ�����64C �� 147F����Ȼ���C���˶̕���s,���@�ӿ��Է�ֹܛ�C���˻֏�(f��)����ԭʼ�Π�,����ʹ�����wͨ���е�Һ�w�����֮��Ҳ����ˡ�����Ñ���ܛ�C���˻֏�(f��)��ԭʼ�Π�,������ֻ���ڳ��Һ�w���ٴμӟ�,���C���˾͕��֏�(f��)����ԭʼ���á�
ԓՓ�ĵĹ�ͬ��Ҫ����,�������_���{������W(xu��)ǰ��ʿ�� Yinding Chi �f�������@���һ���P(gu��n)�I�������{(di��o)�Π�ӛ���������ڰ������wͨ���Čӵĺ�ȡ�����Ҫ�Π�ӛ�������,���Ա���ʩ�������ĉ����r����,����������,����ʹܛ�C���˼�ʹ�ډ���������Ҳ�ܱ������Π��,���
������ʾԓ���g(sh��),���о��ˆT������һ��ܛ�C���ˡ��A���������܉�ʰȡС���w,���о��ˆTʩ��Һ��,��ʹ�A�����A�o���w��ͨ�^�ӟ�,���о��ˆT�܉�?q��)��A�����̶��ڡ��]�ϡ�λ��,����ʹ��ጷ�Һ�������ĉ�����Ҳ����ˡ�Ȼ������ƄӊA����������A�ֵ����w�\�͵���λ�ã�,��Ȼ��,���о��ˆT�ٴ�ʩ�ӟ�����ʹ�A����ጷ���ʰȡ�����w,����ܛ�C�����Ƅ�ҕ�l朽ӣ� https://youtu.be/5SIwsw9IyIc��
11.gif (1.83 MB, ���d��(sh��): 208)
���d����
2024-6-16 21:53 �ς�
22.gif (1.24 MB, ���d��(sh��): 199)
���d����
2024-6-16 21:53 �ς�
��3D ��ӡ��ܛҺ����(zh��)�����еĄ�����ʾ
Փ�Ĺ�ͬ��һ����,�������_���{������W(xu��)��ʿ�� Haitao Qing �f�����������@Щܛ�C���˷dz������҂�����ʹ��С�ͼt���Դ�����p�ɵ،������ӟ��� 64 �z�϶�,������������s��Ҳ�ܿ�,�������@һϵ�в���ֻ��Ҫ��s�ɷ�犡����҄�����һ����Ҫ�ÊA�ӊAס,���҂�߀չʾ��һ�N����Ȼ���������l(f��)�ĊA��,���@Щ�A�ӿ��Կ����p�@���w������o�o�Aס���Ķ����F(xi��n)�ι�ץ��,���@ƪՓ���nj��@��¼��g(sh��)�ĸ�����C,���҂����@���ܛ��(zh��)������С��ܛ�C���ˡ�׃�ΙC���������t(y��)�W(xu��)�����еĝ��ڑ�(y��ng)�øе��dz��d�^,�,���
| 








 �ղ�
�ղ� �D(zhu��n)��
�D(zhu��n)�� ֧��
֧�� ����
����
 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351