��Դ�� EngineeringForLife
�����, �ɾ��и߭h(hu��n)���m���ԵĴ̼�푑�ˮ���z�M�ɵ����b�ñ��J���������t(y��)�W,�����܂������Ϳ��{�C��W���I����������x��,���ɿ����M�����췽��������ȵذl(f��)�]�������đ����������P��Ҫ,�����3D��ӡ���g�����m�ò��ϏV,���ӹ����ȸ�,�����S�����������ȃ�(y��u)�c���m��������N���ܻ�������,��
����������Ĵ�ď����F��Y�˹��3D��ӡ�̼�푑��������������Mչ,�����c��B�˹��3D��ӡ���켼�g�����ܴ̼�푑�ˮ���z�Ϳ��{�C��������؛��ٿv,������ˎ��ͼ����f��,������֧�ܡ��h(hu��n)�����к�W������I�������ͻ��,�����,������˿��{�C�������Č�����^�ɵ����H���̑��õ�����(zh��n)���U����δ�����M���{�C�������l(f��)չ�ęC��,�������ڼ���@Щ���������˽�,�����Mһ�����F(xi��n)���ڸ����I��Č��H���á����P�������}�顰Light-based 3D printing of stimulus-responsive hydrogels for miniature devices: recent progress and perspective���ľC�����°l(f��)����2024��09��17�յ��ڿ���Bio-Design and Manufacturing��,��

640.jpg (84.91 KB, ���d��(sh��): 11)
���d����
2024-10-12 10:17 �ς�
���ľC���˻��ڹ��3D��ӡˮ���z���O���е������Mչ,�����c��B���^ȥʮ�����о��ˆT�ڹ��3D��ӡ���g������푑����Ϻ��ܻ��O�䷽���Ŭ���c�ɾͣ���D1��ʾ��,������푑����ϰ������W,���ضȡ���,������,����Ժ͙Cе�|�l(f��)ģʽ���@Щģʽʹ���O���܉������푑��h(hu��n)��׃��,����׃�κ��\��,���@Щ�����������{�Ժͭh(hu��n)���m���Ե������O��M�����A�ڣ������T���^�{�ײٿ�,������ˎ��ͼ������f,���h(hu��n)�����С����{��W�ͻ���֧�ܵȸ����I��õ��V������,������߀ӑՓ�ˮ�ǰ�о������R����Ҫ����(zh��n)�Լ�δ���о�����,�����Mһ�����M�@Щ�O���ڬF(xi��n)�������еđ��á�
640-1.jpg (103.11 KB, ���d��(sh��): 12)
���d����
2024-10-12 10:17 �ς�
�D1���^ȥ��ʮ����,�����ڹ��3D��ӡˮ���z���о�
����̻�3D��ӡ��
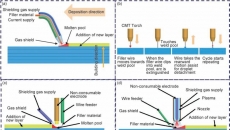
�c�D���͇�ī3D��ӡ���g���,�����ڹ�̻���3D��ӡ���g�ṩ�˸߾��Ⱥ͏��s�Y����ģ��������Ŀǰ��ֹ,�����ڹ��3D��ӡ������Ҫ�֞����w��̣�SLA��,����(sh��)�ֹ�̎����DLP�����B�m(x��)Һ�w�������a��CLIP�����p���Ӿۺϣ�TPP�����w�e�������죨VAM��,��һ�����P�ڔD��3D��ӡ���о��ǻ��ڹ�̻�̎����,��Ȼ�����D����̻���3D��ӡ�����ܵ�����ߴ�Ͳ�����׃���|������,���y���c�����N�����ӡ���g������,�����⣬�ஔ��ľC�����Y�˔D����̻�3D��ӡ,�����,�����C�����c�PעSLA��DLP,��CLIP,��TPP��VAM���g��SLA��1984���_�l(f��)�ĵ�һ�N���ڹ��3D��ӡ���g,�����J�����Ј�����_��3D��ӡ�^��֮һ,��һ����f,��SLAʹ�ü��������Դ,�����������^������ˮƽ�S���ƄӵĘ�֬�����²��ϵ����ӹ̻����D2a��,��SLA��ӡ�^����Ҫ�r�g��y���Ϳ��Ƙ�֬Һλ����,���������w��ӡ�ٶ��^�͡��������3D��ӡ���ٶ�,������˻��ڔ�(sh��)���R�O�䣨DMD��������Ҫ�����{��(ji��)����DLP���g,��ԓ���gʹ����ģͶӰһ�ι̻�һ�ӹ�����֬���������۷e�ԫ@��3D�Y�����D2b��,��DMD���и��ГQ�ٶȺ߷ֱ���,����ˣ������Ա��C��̎�����Ⱥ�̎���ٶ�,��DLP���g�ѽ��@ʾ�����M�����ܺ͑���ǰ��,���������ڸ����I����M������,�������t(y��)�W,�������ϡ���W�������C�ϵ�y(t��ng),��
640-2.jpg (194.75 KB, ���d��(sh��): 11)
���d����
2024-10-12 10:17 �ς�
�D2 ���ڹ��3D��ӡ���gʾ��D
�����W푑���ˮ���z��
���W푑���ˮ���zͨ��ͨ�^�ھW(w��ng)�j�������x�ӻ��F�팍�F(xi��n)���܄�,���x�ӝ�Ⱥ�pHֵ��푑�����ˮ���zͬ�r�����Hˮ���F����ˮ���F�r,������Һ�w�е��Hˮ���֕�����ˮ���Ӳ�̎����Û��B(t��i),���@���^�������ˮ���z���Π�l(f��)��׃����Zhao���ˈ����һ�Nͨ�^���Ӕ�(sh��)�ֹ�̎��(DLP)��ӡ���g�Ƃ���Hˮ-��ˮ�ͺ�ˮ���z����Y���܉F(xi��n)�Π�׃��,���������˭h(hu��n),���������͏����~Ƭ���D3a��������,���x��푑���һ�N�V��ʹ�õļ���-푑�ģʽ,�����O�����ه��ˮ���z��Һ�w�x�ӝ�ȵ��������,�����3-�����������ϩ������}(PSPMA)��ˮ���z�Y���������x�ӏ���׃���r���F(xi��n)��������Π�׃������,��ˮ���z�Y���S���x�ӝ�ȵ�׃���ڃɷN�Π�֮�g�����ГQ���D3b��������,��pH푑���ˮ���z���Ҋ�Ļ��W푑���ˮ���z���֮һ,��pH푑���ˮ���z�ۺ������朔y���x�ӣ���x�ӻ���x�ӣ����F�����m��?sh��)�pHֵ��ˮ���|��,���x�ӻ��F��x���a��늺�,������ˮ���z����Û���տs����Ҫ����,��pHֵ��С׃�����Ԍ��¾ۺ���W(w��ng)�j�W(w��ng)���С���@��׃��,��
640-3.jpg (139.96 KB, ���d��(sh��): 14)
���d����
2024-10-12 10:17 �ς�
�D3 ���ڻ��W푑���ˮ���z�Ĺ��ӡ�ͽY��
���ض�������ˮ���z��
�ض�푑��͆��wҲ�������ӵ�ˮ���z�����T���ض�푑����ۣ�N-��������ϩ��������PNIPAm�����е��R���ܽ�ضȣ�LCST = 32�棩,�����Ҋ�Ĝض�푑���Ԫ,���乤��ԭ���Ǯ��ضȳ��^ˮ���z��LCST�r��ˮ���z����¶����ˮ���F���D���Ȳ���ˮ����,���Ķ��a�����ҵ��տs,��������LCST�ӽ����w�ض��Ҿ������õ����������ԣ�PNIPAm�m���������w����w��ˎ���f���Լ��ӑB(t��i)�ӵ����O��,��Han���ˈ����ʹ�ø߷ֱ���DLP���g3D��ӡPNIPAm�Y��,��ͨ�^����3D��ӡ��ˇ����(sh��)��ˮ���z�ɷ֣������`���{��(ji��)�͆�⏵Ĝض�푑�׃����������D4a��ʾ��,������,��Liao���˘����˶�Nˮ���z�Y�����������~,��׃ɫ���ͻ�����D4b��ʾ��,���������ڲ�ͬ�ض��¸�׃�Π���ɫ������,���ѽ��_�l(f��)�������Π�ӛ�������Ĝض�푑�ˮ���z,������40��犃ȸ�׃�Π��D4c��ʾ���������������O��,�����˺��������ĽY����,��TPP����4D��ӡ߀���F(xi��n)�����ض�푑����O��İl(f��)չ,��Hippler���ˈ����3D PNIPAm���|�Y������ͨ�^��TPP�^���п��ƾֲ��ع℩��,�����F(xi��n)�ˏ��s�Y���Ŀ��OӋ�ʹ�׃��,���ұ۽Y��������20��45��Ĝض���ֱ��׃?y��u)鏝������D4d��ʾ������ض�푑�ˮ���z�������x�ӹ��ۆ��w,�����ϩ��ͱ�ϩ����,���������{��(ji��)��LCST���m�����N���á�����,������ˎN����,�����������ۺ���W(w��ng)�j��NCs�ͻ��h(hu��n)ˮ���z,�����Mһ�����PNIPAmˮ���z�ęCе����,���m�����N���íh(hu��n)����
640-4.jpg (114.17 KB, ���d��(sh��): 9)
���d����
2024-10-12 10:17 �ς�
�D4 ���ڜض�푑���ˮ���z�Ĺ��ӡ�ͽY��
����푑���ˮ���z��
��푑���ˮ���zҲ�ǘ����ͻ��O��ij��ò���,���@Щ�O��Ĺ�푑��C����Ҫ�֞�⮐����/��x�ͼ{�����ӵĹ���D�Q,��ż�������Ҋ�Ĺ⮐������Ԫ֮һ�����������������t���Ĵ̼����ڷ�ʽ/�ʽ�Y��֮�g�ГQ,�,����ڹ��Ч���Ĺ�푑���ˮ���z�������W(w��ng)�j�����Ӹ��N�������ղ��ϣ����{�װ�,��ʯīϩ��̼�{��,�����Ч����ָ���������ܵ���ݗ��rѸ�ُĻ��B(t��i)׃?y��u)鼤�l(f��)�B(t��i)��Ȼ�ػ��B(t��i),�������ԟ����ʽ��ɢ�����û��ڹ��3D��ӡ���g�ѽ��_�l(f��)���˾��������׳ߴ����푑��O��,�,�����SLA���g�������푑��Π�ӛ��ˮ���z���Á혋���Y�����D5a��,���Y����׃�γ̶ȺͽǶȿ���ͨ�^��ͬ�Ĵ�ӡ�Ҷȁ�����,�����⣬ͨ�^����{�װ����s��ˮ���z��,��չʾ��һ�N���ӵ����z�D��,�����s����ʯīϩ���p��ˮ���zҲ�ܿ���푑����t��⡣���ģʽʹˮ���z�p��Ѹ�ټӟᲢŤ�����D5b��,���e��,��TPPҲ�����Á혋���߶ȵ�3D��푑��Y�����c�^��ĽY�����������ף����,���Y��������푑��r�g�s����<1��,��Deng����ʹ���w�뼤��ֱ�ӌ���Ȳ������s�α�̼�{�ܣ�SWCNTs���ĸ��N���s3D�Y��,���@Щ�Y��������NIR��70 mW������300�����׃�Ρ�������ʾ,��������һ���߶ȵ�3D�˹����K,����ͨ�^��̼���C�����^�̣��D5c����
640-5.jpg (196.68 KB, ���d��(sh��): 11)
���d����
2024-10-12 10:17 �ς�
�D5 ���ڹ�푑���ˮ���z�Ĺ��ӡ�ͽY��
����푑���ˮ���z��
�ň��̼��ǟo����,�����_��,�����Ҍ����w�o�������Ը����Ե��������b����,�����,�����N��푑����b���ѽ����_�l(f��)�����t(y��)���C����,��������Ӻ�������������I��,������ˮ���z�W(w��ng)�j�����Ӵ����w���r,���ň����H�ܼ��l(f��)�Π�׃��,��߀���x���O�䏊�ҵ��\������,��ͨ�^�����N����푑��w������Fe3O4�{���w��,��Ni�{���w����NdFeB�w�������ԫ@�ô�푑���ˮ���z,��Xia�����_�l(f��)��һ�N������푑�ܛ�w�C����LarvaBot,��ͨ�^���������NdFeB�w����5 ��m��,��LarvaBot�ṩ��һ��ƽ�_����������x�������\��,������������ϵ�Kʽ��Ӿ�C�����ṩ�ӡ����B(t��i)�x���·��Ҏ(gu��)������Ϣ���D6a��,�,��ɾ��̴Ż��܉�ʹ���O��߂�Ķ��S�����S���s푑�׃�ε����ɶȡ�Diller���о��M�����һ�N�����Ĕ�(sh��)�ֹ�̎��(DLP)��ӡ���g,�������Ӿ���Ӳ���Բ��ϵ�ȡ��,���Ķ���������в�ͬ�Ż����O�䡣��ӡ����֮���Ώ��ɺ����քe�����������{��W�R�ܺ�ܛ�w���ЙC���ˣ��D6b��,������,����Ҫͨ�^TPP���g����������푑��O��Ҳ�������о��Pע��Dong����ʹ��TPP��ˮ���z�И�����3DӾ��,�������������İ����f�ͺͷֻ�,���@ЩӾ���ڼ����f�ͺ��@ʾ�������������Ժ����オ���ԣ��D6c����ֵ��ע�����,����ƵĴ�푑��C�����ѱ���������M�м������Ԝyԇ,�����ˆ���푑��O���⣬߀����ͨ�^TPP���g��������������푑��O�����(zh��)�����W(w��ng)�j,���D6d�@ʾ���ɴ����w����ˮ���z�B�ӽM�ɵ���(zh��)�����W(w��ng)�j,����֮,����(zh��)�����W(w��ng)�j�����M�ж��S�����S��׃��,���������ڽM�����̺͂��������е������Π�׃��,��
640-6.jpg (173.42 KB, ���d��(sh��): 14)
���d����
2024-10-12 10:17 �ς�
�D6 ���ڴ�푑���ˮ���z�Ĺ��ӡ�ͽY��
���푑�ˮ���z��
늈���һ�N�V��ʹ�õļ���Դ���������|�l(f��)ˮ���z���Π�׃��,����C�����@Щˮ���z�еľۺ���朔y�������x�ӻ��F,��������ɂ�ʩ��늉��r��ˮ���z�еĎ���x�Ӻͷ��x�����Ӿ�������������෴�����w��,���@�N��r����ˮ���z�Ȳ��γ��x�ӝ���ݶ�,���Ķ��a����ͬ��ˮ���z�B�����B���IJ����ˮ���z��ͬ�̶ȵ���Û,����K�����䏝����׃��,��ͨ�^DLP���g���������͙C���˿��Ԍ��F(xi��n)�p���Ƅӣ��@Ҳʹ��ͨ�^늈��ӌ��F(xi��n)�IJ����\�ӳɞ���ܣ���D7a��ʾ��,�������x���w����,��늈��T��������ˮ���z�տsҲ��ҕ��һ�N����ģʽ�����ڹ������܉�푑�늴̼��a���տs���ṩ����,����˘����d�й�����������ˮ���z����C�����ǰ���ˎ���f��,�������������ˎ��Y�xƽ�_�ĺ��x�ߡ���D7b��ʾ,���о��ˆT�ѽ�����SLA 3D��ӡ��(y��u)�����푑�ˮ���z����C���˵Ď��OӋ�Ͳ�������,��늈��|�l(f��)������C���˼��⎧�еļ����տs�����a��������ٶȼs��156 µm/s�ă�λ��,��
640-7.jpg (182.67 KB, ���d��(sh��): 10)
���d����
2024-10-12 10:17 �ς�
�D7 ����늺͙Cе푑���ˮ���z�Ĺ��ӡˮ���z
�����ӡ���O��Ĺ��ܡ�
���3D��ӡ���gʹ�Ø����߾��Ⱥ������Π�����S�̼�푑��O��ɞ����,�����m(x��)�ڴ�ӡ���������ܲ����_�l(f��)�����Ŭ����ʹ�û��ڴ̼�푑�ˮ���z���O���ڿƌW�c�����еđ��óɞ�F(xi��n)��,���������c�Pע����؛��ٿ�,������ˎ��ͼ����\ݔ������֧��,���h(hu��n)�����кͿ��{��W�Ĵ̼�푑��O��,���ɴ̼�푑�ˮ���z��ӡ���͈�(zh��)�������Բ�����NҎ(gu��)ģ��؛��������ף����������H���Բٿ�Ӳ�|����,��߀��ץȡ���D����ܛ��������ϣ��缚���;���,��һ��3D��ӡ�Ĝض�푑�ץ���܉������ܿ��Ƶ�Һ�w�ض����F(xi��n)���Ļ\ץȡ���\ݔ,����Һ�w�ضȵ���LCST�r��ץ����7����]�ϲ�ץס�s10����؛��D8a��,�����˿������ⲿ�ň���ץȡ���\ݔ؛���ϵ��ʽץ����,��߀���Ի��ڴ�푑�ˮ���z����o��ץ�֣��D8b���������`��Ĵň�����,������ץ���܉�ץס؛�ﲢ��Խ�ϵK��,���e�nj�����؛��IJ������O�������һ������(zh��n),��TPP���g�_�l(f��)�Ĵ̼�푑���(zh��)�������S���Ƶ�ʰȡ���D����؛��������ͼ���,��Zhang�ĈF��_�l(f��)��һ�N����pH푑�ˮ���z����(zh��)����,�������Á�ץȡֱ���_10�������@�R�͒�������@�R�D��չʾ����(zh��)�������F(xi��n)��ץȡ�^�̣��D8c��,������,��Wu�ĈF������һ�N�ӑB(t��i)ؐ��������TPP̎����������������pH푑�ˮ���zץ��,���@Щץ�ֿ���ԭλ���@�ɼ�����NSCs�����D8d��,�����⣬Ma���������һ�NоƬ��TPP���g,�������B�m(x��)��оƬ������ɷN��������,���@һ�^������������оƬ��ɵġ����߶������������켡�����ϵ�y(t��ng),��ԓϵ�y(t��ng)�܉���ƽ�_���`��؊A�o���D�������D8e��,������؛��ץȡ���\ݔ�����ӡ��ˮ���z�C����߀�������{��(ji��)���ɼ�������������,�������ڝ��ڵİ��������ί�����,��
640-8.jpg (151.71 KB, ���d��(sh��): 11)
���d����
2024-10-12 10:17 �ς�
�D8 ���ڴ̼�푑����b�õ�؛��ٿ�
������ˎ��ͼ����f�͡�
�����ڸ����������Ժ��{��ؓ�d����������ˮ���z���t(y��)���C�����m�ϰ����ί��ͼ�����ֲ�r�b�dˎ��ͼ���,������ˮ���z�����{�W(w��ng)�j,��ˎ����ӿ����cˮ����һ���������@Щ��W(w��ng)�j�С���?sh��)��_Ŀ�˅^(q��)��r,���t(y��)���C�����ܵ��̼��տs���D��ˎ���������ɾ��ʵ�ˎ���f��,��Sitti���о��M�����һ�Nֱ����6 ��m���L�Ȟ�20 ��m���p�����C����,��ԓ�C�����܉�ʹ���ⲿ��̼���������ጷŻ���ˎ�ﰢù��(DOX),����¶���������30��犣��ɹ⏊���@���½�,������DOX���C����ˮ���z�W(w��ng)�j���ѽⲢጷţ��D9a��,�����⣬���_��ˎ��ጷſ���ͨ�^�̼�푑����C���˵��Π��ГQ������,��Xin����ʹ���p�ش�-pH푑���ˮ���z�������~���C����,�����дň������\�ӣ�pHֵ�����~���Π��ГQ,���C����ͨ�^���_�~�ڰ������˹�ë��Ѫ�܃�ጷ�ˎ�����,�������[�������ί����D9b����
640-9.jpg (180.42 KB, ���d��(sh��): 10)
���d����
2024-10-12 10:17 �ς�
�D9 ���ڴ̼�푑����b�õİ���ˎ��ͼ����f��
�����Y�cչ����
�C������,����һ���O��İl(f��)չ����(y��u)�ȿ��]�����O��,���@Щ�O���ڙC���˼��g,��оƬ����ҡ���������W���I��Ҳ���ЏV韵đ���ǰ��,�������O���ǹ��̌W,�����ϿƌW�����W,���C���˼��g,����W�������t(y��)�W�����I������d�I�W�g����I(y��)���в�ͬ�I����ж��ӻ����I(y��)֪�R���о��ˆT֮�g�ľo�ܺ����DZ�Ҫ��,���Ԍ��F(xi��n)�܉����w�Ȉ�(zh��)���ί����ܵ�푑�ʽ�C����,���Լ��ڏ��s�����l���¿��{��(ji��)�Ĺ�W�O�䡣
����Դ��
https://link.springer.com/article/10.1007/s42242-024-00295-1
|










 �ղ�
�ղ� �D��
�D�� ֧��
֧�� ����
����
 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351