來源:摩方精密
現(xiàn)有的導(dǎo)管技術(shù)在微小且復(fù)雜的血管系統(tǒng)中存在進入困難、操作效率低以及對血管組織損傷風險較高等問題,限制了內(nèi)血管治療的廣泛應(yīng)用和效果提升。盡管微導(dǎo)管已成為神經(jīng)血管、心血管等微細血管的靶向介入治療的重要工具,但由于血管結(jié)構(gòu)復(fù)雜和血流環(huán)境惡劣,傳統(tǒng)微導(dǎo)管難以實現(xiàn)精準操控與多功能治療。因此,開發(fā)一種能夠?qū)崿F(xiàn)精確導(dǎo)航、有效治療且具有良好組織兼容性的微導(dǎo)管系統(tǒng)成為實際臨床需求的迫切方向,為卒中、動脈閉塞等血管疾病的微創(chuàng)治療提供新的技術(shù)支持。
近期,香港中文大學機械與自動化工程學系張立教授團隊與香港理工大學楊立冬助理教授聯(lián)合香港中文大學醫(yī)學院內(nèi)科及藥物治療學系腦神經(jīng)科助理教授葉耀明醫(yī)生、香港中文大學醫(yī)學院內(nèi)科及藥物治療學系利國偉腦神經(jīng)學教授及腦神經(jīng)科主任梁慧康教授在《Science Advances》期刊上在線發(fā)表題為“A magnetically actuated microcatheter with soft rotatable tip for enhanced endovascular access and treatment efficiency” 的原創(chuàng)性論著。香港中文大學機械與自動化系博士后張沫艽博士為論文第一作者,香港理工大學楊立冬助理教授,香港中文大學醫(yī)學院內(nèi)科及藥物治療學系腦神經(jīng)科助理教授葉耀明醫(yī)生、香港中文大學醫(yī)學院內(nèi)科及藥物治療學系利國偉腦神經(jīng)學教授及腦神經(jīng)科主任梁慧康教授和香港中文大學機械與自動化系張立教授為論文共同通訊作者。

640.jpg (88.46 KB, 下載次數(shù): 0)
下載附件
昨天 11:20 上傳
該研究提出了一種基于3D打印技術(shù)制造的亞毫米級磁控軟旋轉(zhuǎn)微導(dǎo)管,成功實現(xiàn)了在狹窄復(fù)雜血管中的高精度導(dǎo)航與多功能一體化治療。通過采用3D打印工藝精確構(gòu)建低剛度且可旋轉(zhuǎn)的螺旋柔性導(dǎo)管頭部,實現(xiàn)了柔性材料與微尺度結(jié)構(gòu)的有機結(jié)合,不僅提升了導(dǎo)管的可控性和安全性,還顯著增強了藥物與血栓的作用效率及機械血栓破碎能力,為血管介入手術(shù)中的微創(chuàng)治療提供了高效且創(chuàng)新的技術(shù)方案,推動了軟體醫(yī)療機器人在臨床中的應(yīng)用轉(zhuǎn)化。
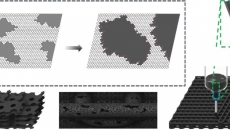
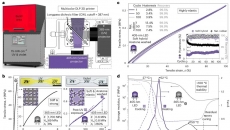
該磁控軟旋轉(zhuǎn)微導(dǎo)管的制作過程基于結(jié)合3D打印與翻模工藝,首先利用摩方精密面投影微立體光刻(PμSL)3D打印技術(shù)制造出導(dǎo)管頭部的模具,實現(xiàn)復(fù)雜螺旋結(jié)構(gòu)的精細成形。隨后采用軟性硅膠材料(PDMS)進行倒模成型,得到低剛度且具有旋轉(zhuǎn)能力的螺旋形導(dǎo)管外殼,該設(shè)計有效避免了傳統(tǒng)硬質(zhì)結(jié)構(gòu)對血管壁的硬性接觸,提升了血管組織的安全性。導(dǎo)管內(nèi)部嵌入永久磁鐵和微型球形關(guān)節(jié),實現(xiàn)導(dǎo)管頭部的三維旋轉(zhuǎn)自由度。整個微導(dǎo)管的外徑控制在800微米以內(nèi),兼具足夠的推送力和柔性,能夠適應(yīng)血管的復(fù)雜曲折結(jié)構(gòu)(圖1)。
640-1.jpg (91.58 KB, 下載次數(shù): 0)
下載附件
昨天 11:20 上傳
圖1. 亞毫米級磁控微導(dǎo)管的加工方法。
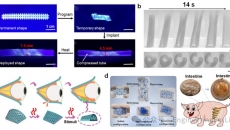
在導(dǎo)航實驗中,利用機器人臂控制的五自由度磁體系統(tǒng)產(chǎn)生定向和旋轉(zhuǎn)磁場,實現(xiàn)微導(dǎo)管頭部的精準定位和方向控制。實驗設(shè)置包括人腦血管硅膠仿真模型,涵蓋多處狹窄且角度尖銳的分支,通過旋轉(zhuǎn)輔助導(dǎo)航策略減少導(dǎo)管尖端與血管壁的摩擦阻力,有效防止導(dǎo)管體的彎曲和卡阻。結(jié)果顯示,旋轉(zhuǎn)輔助方法使導(dǎo)管在多重急轉(zhuǎn)彎的血管模型中通行更加順暢,導(dǎo)航效率較傳統(tǒng)靜態(tài)磁場引導(dǎo)提升約50%,且插入力顯著降低,驗證了微導(dǎo)管設(shè)計在實際應(yīng)用中高效且安全的導(dǎo)航性能。此外,旋轉(zhuǎn)運動還能促進流體在導(dǎo)管工作腔的輸送,增強藥物輸送效能(圖2)。
640-2.jpg (164.76 KB, 下載次數(shù): 0)
下載附件
昨天 11:20 上傳
圖2. 主動轉(zhuǎn)向策略的原理與實驗驗證。
該研究開發(fā)的磁控軟旋轉(zhuǎn)微導(dǎo)管(MSRM)具備多項創(chuàng)新醫(yī)療功能,顯著提升血管內(nèi)介入治療的效率和安全性。首先,微導(dǎo)管通過旋轉(zhuǎn)輔助主動轉(zhuǎn)向,實現(xiàn)對狹窄、復(fù)雜、曲折血管的高效導(dǎo)航,減少導(dǎo)管尖端與血管壁的摩擦,避免彎曲和卡阻,保障在直徑小于2毫米的遠端血管中的優(yōu)異通達能力。其次,該導(dǎo)管集成了多種治療功能,包括藥物輸送、機械血栓破碎和血栓碎片回收。導(dǎo)管頭部的旋轉(zhuǎn)螺旋結(jié)構(gòu)不僅能夠促進藥物與血栓的高效接觸,加快溶栓速度,還能通過機械摩擦作用物理破壞血栓,提高溶栓治療的總體效果。此外,旋轉(zhuǎn)運動產(chǎn)生的流體動力能夠逆向輸送血栓碎片,配合吸引裝置實現(xiàn)血栓碎片的安全回收,降低血管堵塞和遠端栓塞風險。這種藥物-機械聯(lián)合治療策略有效克服了單純藥物溶栓或機械治療的局限。最后,導(dǎo)管柔軟的旋轉(zhuǎn)頭部設(shè)計和溫和的操作模式降低了血管損傷風險,符合臨床對微創(chuàng)、安全性的需求。動物體內(nèi)及人體血管模型中的實驗證明了MSRM在血栓清除和遠端血管訪問上的高效性和安全性,有望為卒中及其他血管疾病提供更加精準、快速且低創(chuàng)傷的介入治療手段(圖3)。
640-3.jpg (293.27 KB, 下載次數(shù): 0)
下載附件
昨天 11:20 上傳
圖3. MSRM 螺旋形頭部流體與治療功能設(shè)計與仿真結(jié)果。
在新西蘭兔體內(nèi)實驗中,MSRM微導(dǎo)管成功實現(xiàn)了對復(fù)雜血管分支的高效導(dǎo)航,旋轉(zhuǎn)輔助主動彎曲策略使導(dǎo)航速度提升約50%,顯著降低了導(dǎo)管張力和卡阻風險。結(jié)合局部注射溶栓藥物,微導(dǎo)管通過機械旋轉(zhuǎn)輔助快速分解和清除血栓,血栓在15分鐘內(nèi)顯著消除,且未觀察到血管損傷或并發(fā)癥。實驗結(jié)果表明,MSRM具備優(yōu)異的操作性能和良好的生物相容性,體現(xiàn)了其在微血管導(dǎo)航及血栓治療中的高效性和安全性(圖4)。
640-4.jpg (184.17 KB, 下載次數(shù): 0)
下載附件
昨天 11:20 上傳
圖4. 活體動物實驗的設(shè)計示意圖和驗證結(jié)果。
MSRM制備方法:通過摩方面投影微立體光刻(PμSL)技術(shù)(nanoArch® S130,精度:2μm)制備負模,隨后用非磁性夾具固定負模,注入預(yù)制的PDMS液體,并在負模內(nèi)嵌入微型永磁體,固化3小時。脫模后獲得軟性螺旋形導(dǎo)管尖端,球形關(guān)節(jié)腔及中空關(guān)節(jié)采用摩方微納3D打印技術(shù)制備,最終通過手動組裝,完成可旋轉(zhuǎn)的軟性微導(dǎo)管尖端。
總結(jié):本文提出了一種具備軟質(zhì)可旋轉(zhuǎn)末端的磁控微導(dǎo)管,旨在提升血管內(nèi)介入的可達性和治療效率。該微導(dǎo)管通過旋轉(zhuǎn)輔助自主轉(zhuǎn)向,顯著改善了在狹窄彎曲血管中的導(dǎo)航能力。實驗證明其在體外腦血管模型和活體動物中表現(xiàn)出優(yōu)異的操控性和導(dǎo)航能力,有望推動磁控微型醫(yī)療機器人的發(fā)展與臨床應(yīng)用。
這項研究得到香港研究資助局(RGC)、香港創(chuàng)新科技署(ITC)、中大天石機器人研究所、中大-中國科學院深圳先進技術(shù)研究院機器人與智能系統(tǒng)聯(lián)合實驗室、創(chuàng)新香港研發(fā)平臺(InnoHK)的醫(yī)療機器人創(chuàng)新技術(shù)中心(MRC)的支持。該工作得到新加坡南洋理工大學沈祖堯教授、中國科學技術(shù)大學王柳教授的大力合作和幫助。
原文鏈接:https://doi.org/10.1126/sciadv.adv1682
| 





 收藏
收藏 轉(zhuǎn)播
轉(zhuǎn)播 支持
支持 反對
反對
 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351