��ǰ,�����Ե�˹���K�����о���,���K����(li��n)�������WԺ�������炐�ȁ���W�ĿƌW�҂���ͬ�l(f��)����һƪՓ��,������������ͨ�^ܛ���ٿv3Dģ�͵ăɷN����˼�h�ķ����� ԓܛ���߂伯��ָ������Cе�\�ӵ�����,����ԓܛ�����ɵ�3Dģ�ͽ�(j��ng)�^3D��ӡ��,�����ɞ���ԙCе�\�ӵ��P��(ji��)�˻�Cеϵ�y(t��ng)��

1.jpg (25.81 KB, ���d��(sh��): 137)
���d����
��˹���_�l(f��)����3D��ӡ���s�Cе�����ܛ��
2014-8-13 10:45 �ς�
���S��3D��ӡ�C�ij��F(xi��n)���Cе���삀�Ի��ęCе���,������,�������ǙC���ˌ�׃�ú��ձ��,���Փ�ķQ��������,������]�Ќ��T��ܛ���Ď������OӋ�@�ӵĵĄӮ�����ɞ���ͨ�Ñ����������ɵ��΄�,�,���
����о��ˆT�ѽ�(j��ng)����˃ɷN��Ҫ����,��������һ������ChaCra��ܛ��,��ԓܛ�����Ԏ����Ñ����x2D������\�ӷ�ʽ������ƤӰ���ǘ�,���e�����f,����������OӋ��һֻ�B�Ŀ�3D��ӡģ�ͣ�ԓģ�Ϳ���ͨ�^�N��ͬ���\���P��(ji��)�Ȅӳ��,����(j��)�˽�,���о��ˆT�_�l(f��)����һ���ʽܛ��ϵ�y(t��ng)�������Ԏ����Ñ��OӋ������ƽ��Cе���ԵČ���,���������ƤӰ�ǘ�,���о��ˆT�_�l(f��)��һ�N���T���߲���팍�F(xi��n)�@��������,��ԓܛ�����S�Ñ����εع���һ������,��������[����Ҫ���˄ݣ�ܛ������Ӌ�����Ҫʲô�ӵ��ĺͼ���ʲô�Cе�Y��,���@���^����Փ���vֻ����,��
2.jpg (28.35 KB, ���d��(sh��): 161)
���d����
��˹���_�l(f��)����3D��ӡ���s�Cе�����ܛ��
2014-8-13 10:45 �ς�
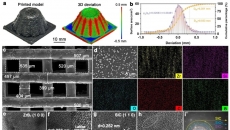
��D��ʾ��һ�N늄әC��M�����µ�朽ӣ�cnew��,���B�Ӳ���ca��cb����,��ܛ���OӋ��С�����رۣ����g���Ͷ��B�ӣ��ң��Է�ֹqb��m,��qa�M�ɵ������ε���e�^С,��
ܛ���OӋ�������ЙCе�Y����Ҫ��������������Ҫ�Cе�M����
�B������Connectors������ؓ؟�ɲ���֮�g�������\��
�����ߣ�Propagators������ؓ؟���c��Ŀ�ĵ����\��
�{(di��o)��Trimmers������ؓ؟���ƶ��IJ����\���������ƶ��ķ�����(n��i)
��һ�N�����ǣ��OӋ����(li��n)�Ӟ���A���Ԅӻ��Cе����,��ʹ���܉����挍��,�������ŷ��ķ�ʽ�\�ӡ�
���M���@�N(li��n)�����ɷ��,������IJ����M�ɵ�,�����������Ԍ��F(xi��n)���s�ģ������������@Ӡ�Ą����,�����˹���K�����о����ĿƌW��Stelian Coros�f,��
������ʾ���о��ˆTʹ��ԓܛ���OӋ��һ�N�Cе����,�������(q��)���b�ÙC���ǰ��b�ڸ����P��(ji��)��늙C,�� Ȼ��ԓܛ���܉�ʹ�Ñ��ÿɌ��F(xi��n)����ͬ���֡��Cе��ϡ��Ą����B�Ӂ�������Щ늙C�P��(ji��),������]��ԓܛ��,���@�ӵ���D�����Ǻ��y���F(xi��n)�ġ�����,��ԓ���ߌ����S�Ñ�̽�����N��ͬ��ʽ��(li��n)��,���������������OӋ�б��������K���w�\�ӵęCеȱ�ݡ�
3.jpg (33.35 KB, ���d��(sh��): 139)
���d����
��˹���_�l(f��)����3D��ӡ���s�Cе�����ܛ��
2014-8-13 10:45 �ς�
�@�Nܛ������ʹ�Ñ���һ�������(n��i)�����F(xi��n)���s�ęCе�OӋ,�����ܺ��ε،���3D��ӡ����,���ƌW�҂��f����߀���_�l(f��)�����Mһ���Ĺ���,��ʹ�κ���ֻ�躆�εع��ՈD��,�����܉��OӋ�����s�ęC���˺͙Cеϵ�y(t��ng)�ġ��о��ˆT�Q�@ֻ�Ǖr�g���},��
|
��һƪ��3D��ӡ����ˮ���^�����Օ����Ȼ����֭��һƪ��EOD Life 3D��ӡ���Ƶ���
|










 �ղ�
�ղ� �D��
�D�� ֧��
֧�� ����
����

 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351