本帖最后由 眼鏡熊 于 2021-7-21 12:57 編輯
南極熊獲悉,華盛頓州立大學(xué)、新加坡科技與設(shè)計(jì)大學(xué)和科羅拉多大學(xué)丹佛分校學(xué)者們提出了一種設(shè)計(jì)和直接制造新型軟復(fù)合結(jié)構(gòu)的方法,利用計(jì)算拓?fù)鋬?yōu)化以及彈性有機(jī)硅聚合物制造軟復(fù)合結(jié)構(gòu)。團(tuán)隊(duì)將這種方法結(jié)合仿生設(shè)計(jì)制造了一種鰩魚形態(tài)的軟機(jī)器人,并模擬游泳狀態(tài)。

軟復(fù)合材料。.jpg (124.32 KB, 下載次數(shù): 74)
下載附件
2021-7-21 12:53 上傳
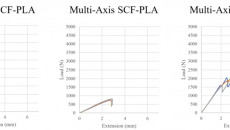
△軟復(fù)合材料。A) 剛性基質(zhì)中軟纖維狀的E3DP以調(diào)整機(jī)械性能:嵌入儲(chǔ)層(材料 2)中的短纖維狀陣列(材料 2)有助于調(diào)整復(fù)合結(jié)構(gòu)的拉伸性能。B) 軟復(fù)合材料的測(cè)試樣品。C) 復(fù)合材料樣品及其單個(gè)組件拉伸試驗(yàn)的應(yīng)力-應(yīng)變曲線。
材料和結(jié)構(gòu)在軟機(jī)器人性能方面起著關(guān)鍵作用,然而,當(dāng)前的設(shè)計(jì)和制造方法在復(fù)雜結(jié)構(gòu)和功能上存在一定的限制,并阻礙了軟機(jī)器人的性能。在本篇論文里,研究團(tuán)隊(duì)將拓?fù)鋬?yōu)化(TO)與增材制造相結(jié)合,受到鰩魚啟發(fā)制造軟機(jī)器人,并利用鰭的水下運(yùn)動(dòng)作為實(shí)驗(yàn)工具針對(duì)運(yùn)動(dòng)學(xué)進(jìn)行研究。
制作軟蝙蝠形機(jī)器人。.jpg (320.68 KB, 下載次數(shù): 67)
下載附件
2021-7-21 12:53 上傳
△制作軟蝙蝠形機(jī)器人。A) 機(jī)器人本體使用FFF制造。B) 內(nèi)部組件(例如,制動(dòng)器、傳感器、電池等),分配器將主體基質(zhì)材料沉積在模具內(nèi)部。C) 精密分配器將最佳圖案嵌入彈性體墨水。D) 將具有各向同性材料的各種墨水嵌入各向同性基體材料中。E) 鰭打印:通過DIW沉積鰭水庫(kù)。F) 鰭片打印:復(fù)合纖維E3DP。G) 復(fù)合翅片。H) 成品軟鰩魚機(jī)器人復(fù)合鰭。I) 各向同性硬鰭。J) 優(yōu)化的復(fù)合鰭。
團(tuán)隊(duì)改進(jìn)了市售的多用途3軸運(yùn)動(dòng)控制3D打印機(jī)(System 30M,Hyrel Inc.),以及一個(gè)可容納多達(dá)四個(gè)打印頭的托架工具。FFF制造工藝使用廠商配置打印頭(MK1-250,Hyrel Inc),而流體分配使用氣動(dòng)流體分配系統(tǒng)(Ultimus V,Nordson EFD)與通過定制適配器連接到3D打印機(jī)的針頭和注射器。G代碼使用開源Slic3r包的定制版本,從CAD數(shù)據(jù)自動(dòng)生成,并針對(duì)復(fù)雜結(jié)構(gòu)對(duì)核心包進(jìn)行了大量修改。拓?fù)鋬?yōu)化被用于設(shè)計(jì)具有復(fù)雜內(nèi)部結(jié)構(gòu)的復(fù)合軟鰭,通過微調(diào)模擬鰭的振蕩行為。這種軟機(jī)器人在設(shè)計(jì)和制造的兩個(gè)關(guān)鍵步驟實(shí)現(xiàn)自動(dòng)化:i) 使用TO的復(fù)合結(jié)構(gòu)設(shè)計(jì)和 ii) 在單個(gè)制造中心制造復(fù)雜結(jié)構(gòu),這極大地促進(jìn)了定制能力軟機(jī)器人制造的發(fā)展。
軟機(jī)器人設(shè)計(jì)與拓?fù)鋬?yōu)化。.jpg (394.99 KB, 下載次數(shù): 69)
下載附件
2021-7-21 12:51 上傳
△軟機(jī)器人設(shè)計(jì)與拓?fù)鋬?yōu)化。A)機(jī)器人組件:兩個(gè)伺服驅(qū)動(dòng)的襟翼激發(fā)胸鰭振動(dòng)。內(nèi)部微控制器單元、可充電電池和感應(yīng)充電單元可實(shí)現(xiàn)完全自主。B) 類鰩魚鰭運(yùn)動(dòng)學(xué)和相關(guān)參數(shù)。 C) 大胸鰭(淺灰色)模型。黑色鰭區(qū)域表示嵌入的擋板位置,紅色邊緣是固定的,藍(lán)色和綠色邊緣代表鰭的自由邊界。D)不同材料區(qū)域的初始和優(yōu)化設(shè)計(jì),以及通過短黑線表示的最佳纖維方向。E) 優(yōu)化目標(biāo)z,相對(duì)于初始誤差與迭代次數(shù)進(jìn)行歸一化。F) 從模擬(黑色曲線)和實(shí)驗(yàn)(藍(lán)色曲線)與目標(biāo)運(yùn)動(dòng)學(xué)(紅色曲線)獲得的最佳設(shè)計(jì)的同相(實(shí)線)和異相(虛線)偏轉(zhuǎn)的比較。G)從模擬獲得的不同時(shí)間的最佳翅片設(shè)計(jì)的跨度(即(C)中的藍(lán)色邊緣)撓度,H)從實(shí)驗(yàn)獲得的跨度翅片撓度。
軟機(jī)器鰩魚具有大鰭,可以像真的生物行為一樣運(yùn)動(dòng),通過推進(jìn)器(鰭)的變化會(huì)對(duì)機(jī)動(dòng)性和推進(jìn)力產(chǎn)生顯著影響。每個(gè)軟鰭具有一個(gè)柔性擋板,由伺服電機(jī)驅(qū)動(dòng),用于激發(fā)鰭振蕩。機(jī)器人配備觸發(fā)板載ArduinoUno微控制器,并由可充電鋰電池供電。模型長(zhǎng)180毫米,具有中等浮力,并使用鉑催化有機(jī)硅聚合物完全封裝。
軟機(jī)器人性能表征的實(shí)驗(yàn)裝置。.jpg (168.58 KB, 下載次數(shù): 73)
下載附件
2021-7-21 12:51 上傳
△軟機(jī)器人性能表征的實(shí)驗(yàn)裝置。A) 三個(gè)鰭片(鰭片A、鰭片D和復(fù)合鰭片)在下劃結(jié)束時(shí)的側(cè)視圖快照。B) 長(zhǎng)120厘米、寬120厘米、深70厘米的鋼化玻璃水箱。C) 力和扭矩測(cè)量實(shí)驗(yàn)裝置的細(xì)節(jié)。D) 有效波長(zhǎng)。
與傳統(tǒng)軟機(jī)器人制造方法相比,本研究中提出的集成制造工藝能夠以更少的人工干預(yù)實(shí)現(xiàn)優(yōu)化材料特性分布,在新的復(fù)雜度水平上產(chǎn)生所需的身體運(yùn)動(dòng)學(xué)。通過將自動(dòng)化材料混合過程納入制造,消除手動(dòng)步驟,例如工具更換和材料重新填充。進(jìn)一步的工作可以通過更集成的方式為E3DP刀具路徑自動(dòng)生成G代碼,并帶有線框或類似矢量的打印移動(dòng)(具有方向性)。另外,還可以將CAD數(shù)據(jù)轉(zhuǎn)換為刀具路徑和機(jī)器控制程序,以及提高分辨率增加纖維密度,完善鰭片并實(shí)現(xiàn)自動(dòng)化。
參考文獻(xiàn):Boddeti, N., Van Truong, T.,Joseph, V., Stalin, T., Calais, T., Lee, S., Dunn, M. and Valdivia y Alvarado,P., 2021. Optimal Soft Composites for Under‐Actuated Soft Robots. AdvancedMaterials Technologies, p.2100361.
| 








 收藏
收藏 轉(zhuǎn)播
轉(zhuǎn)播 支持
支持 反對(duì)
反對(duì)
 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351