本帖最后由 warrior熊 于 2021-10-19 22:21 編輯
導讀:在動漫《超能陸戰(zhàn)隊》中,熱愛發(fā)明創(chuàng)造的天才少年小宏,,曾發(fā)明了一種神奇的微型磁力機器人,,它可以按照操作者的指令集體行動、隨意變換成各種形狀,。但你恐怕想不到,,現(xiàn)實中正在有科學家把它一步步變成現(xiàn)實。

4.png (254.13 KB, 下載次數(shù): 50)
下載附件
2021-10-19 22:18 上傳
5.jpg (103.96 KB, 下載次數(shù): 43)
下載附件
2021-10-19 22:21 上傳
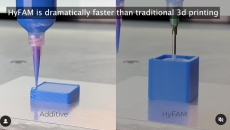
2021年10月19日,,南極熊獲悉,,來自圣母大學的研究人員已經(jīng)成功地3D打印出了一種四條腿的蜂群機器人,它能夠穿越復雜的地形并克服行進路徑上的障礙,。一直以來,,圣母大學的機器人工程師和電子工程助理教授Yasemin Ozkan-Aydin都在嘗試使用機器人模仿螞蟻、蜜蜂和鳥類的集體行為來解決問題,。
這項研究探討了在單個機器人之間如何建立物理聯(lián)系,,并能夠提高陸地腿部集體系統(tǒng)的機動性和能力。例如,,如果一個機器人遇到了他們無法克服的障礙,,其他機器人就會聚集在一起集體解決這個問題。
她說:"腿型機器人可以在具有挑戰(zhàn)性的環(huán)境中前行,如粗糙的地形和狹小的空間,,四肢的使用提供了有效的身體支持,,實現(xiàn)了快速機動性,有利于跨越障礙,。然而,,腿型機器人在陸地環(huán)境中面臨獨特的移動性挑戰(zhàn),這導致運動性能下降,�,!�
fig1_1_feature.jpg (138.64 KB, 下載次數(shù): 43)
下載附件
2021-10-19 22:11 上傳
△3D打印的四腳蜂群機器人。圖片來自圣母大學,。
受自然啟發(fā)的蜂群機器人
研究人員越來越多地從自然界及其生物群的行為中獲得靈感,,以開發(fā)用于各種應用的空中和水下機器人技術(shù)。然而,,開發(fā)這種具有穿越復雜地形和克服障礙能力的機器人具有挑戰(zhàn)性,。
特別是,一些研究人員試圖繪制和模仿動物王國中那些自組織集體的行為,,如蟻群,、鳥群和魚群。盡管是試圖復制這種自然集體智慧,,但他們的蜂群機器人往往是遙控的或GPS引導的,,而不是自組織的。
早在2014年,,作為CoCoRo(集體認知機器人)項目的一部分,,3D打印被用于創(chuàng)建海洋環(huán)境的蜂群機器人。該項目有五所歐洲大學參與,,最終產(chǎn)生了40個3D打印的迷你潛艇機器人,,它們可以一起工作,執(zhí)行復雜的任務,。
最近,,哈佛大學的一個研究小組在這一領域又向前邁進了一步,他們成功地3D打印了一群軟體機器人魚,,能夠在沒有Wi-Fi或GPS的幫助下以復雜的模式游泳,。這些機器人的自行組織的能力,可以使它們被部署在人類無法進入的海洋環(huán)境中進行生態(tài)監(jiān)測,。
目前,,地面機器人群僅限于相對簡單的環(huán)境,Ozkan-Aydin說這部分是由于缺乏運動能力來處理困難地形,。因此,,在2020年初,她開始進行研究和實驗,以復制動物群落和羊群的自組織行為,,以提高蜂群機器人的能力,。
2.png (352.19 KB, 下載次數(shù): 49)
下載附件
2021-10-19 22:11 上傳
△哈佛大學的科學家們制造的仿生魚型機器人具有攝像頭和藍色LED,幫助它們在水下導航,。照片來自自組織系統(tǒng)研究小組。
3D打印蜂群機器人
Ozkan-Aydin的研究基于這樣一個前提:單個機器人之間的物理連接可以提高整個系統(tǒng)的機動性和能力,。從本質(zhì)上講,,如果一項特定的任務超出了單個機器人的能力,如搬運物體,,機器人將相互進行物理連接,,形成一個更大的多腿系統(tǒng),共同承擔重量,。
Ozkan-Aydin解釋說:"當螞蟻收集或運輸物體時,,如果一個螞蟻遇到了障礙物,那么這個群體就會集體工作來克服這個障礙,。例如,,如果路徑上有一個缺口,它們會形成一座橋,,這樣其他螞蟻就可以走過去--這就是這項研究的靈感所在,。通過機器人技術(shù),我們能夠更好地了解這些生物系統(tǒng)的動態(tài)和集體行為,,并探索我們在未來如何能夠使用這種技術(shù),。"
為了創(chuàng)建她的機器人群,Ozkan-Aydin使用一臺3D打印機來生產(chǎn)低成本的四腳機器人,,長度在15到20厘米之間,。每個機器人都配備了一個鋰聚合物電池、一個微控制器和三個傳感器,。除了前面的光傳感器外,,每個機器人的前面和后面都有兩個磁性觸摸傳感器,以使它們能夠連接到蜂群中的其他人,。
據(jù)Ozkan-Aydin說,,每個機器人都是用3D打印的,有四條靈活的腿,,這使機器人具有一定程度的 "機械智能",,減少了對額外傳感器的需求。
她說:"你不需要額外的傳感器來檢測障礙物,,因為腿部的靈活性可以幫助機器人直接越過它們,。它們可以測試路徑中的空隙,用它們的身體搭建橋梁;單獨移動物體,;或者在不同類型的環(huán)境中連接起來集體移動物體,。"
蜂群機器人的測試
在3D打印每個機器人后,Ozkan-Aydin測試了機器人在草地,、地膜和長毛地毯等地形上的能力,,以及克服樹葉和橡子等障礙的能力。她在刨花板上測試了機器人在平地上的能力,,還用絕緣泡沫和木塊建造了樓梯,,作為粗糙的地形進行模擬實驗。
當一個單獨的機器人卡在一個障礙物上時,,一個信號被發(fā)送到機器人群中的其他機器人,。然后,它們通過磁性觸摸傳感器聯(lián)系在一起,,提供支持,,并成功克服障礙物或有關地形。
雖然Ozkan-Aydin承認她的機器人群設計還有待改進,,但她相信這項研究將有助于為低成本腿型機器人群的設計提供信息,,使其能夠適應未預見的情況。她預計,,她的研究將有助于開發(fā)能夠執(zhí)行現(xiàn)實世界任務的蜂群機器人,,如搜索和救援行動、運輸物體,、環(huán)境監(jiān)測,,甚至太空探索。
今后,,Ozkay-Aydin將通過進一步探索螞蟻和白蟻等昆蟲的集體動力學,,把研究重點放在改善蜂群機器人系統(tǒng)的控制、感應和動力能力上,。在改進機器人內(nèi)部的電池技術(shù)的同時,,未來的工作將著眼于納入更多的傳感器和更強大的電機,同時保持其小尺寸,。
她說:"對于功能性蜂群系統(tǒng),,電池技術(shù)需要改進。我們需要能夠提供更多能量的小型電池,,最好能持續(xù)10小時以上,。否則,在現(xiàn)實世界中使用這種類型的系統(tǒng)是不可持續(xù)的,。你需要考慮機器人在現(xiàn)實世界中如何運作,,所以你需要考慮需要多少電力,,你使用的電池的大小。一切都很有限,,所以你需要對機器的每個部分做出決定",。
關于這項研究的進一步信息可以在《科學機器人》雜志上發(fā)表的題為:"Self-reconfigurablemultilegged robot swarms collectively accomplish challenging terradynamic tasks"的論文中找到。這項研究是由Y. Ozkan-Aydin和D. Goldman共同撰寫的,。
3.jpg (161.06 KB, 下載次數(shù): 54)
下載附件
2021-10-19 22:11 上傳
|  收藏
收藏 轉(zhuǎn)播
轉(zhuǎn)播 支持
支持 反對
反對








 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351