| |
相關(guān)帖子
|
|

UCLA團隊開發(fā)3D打印低成本診斷筆,實現(xiàn)高精

推動大幅面激光粉末床技術(shù)在日本產(chǎn)業(yè)化應用
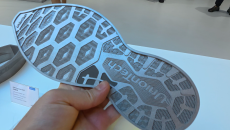
總投資1.5 億元,聯(lián)泰科技殺入金屬3D打印鞋

3D打印從技術(shù)突破到規(guī)模應用:第四屆中國(
投資2億元,年產(chǎn)能達到4580噸,有研粉材建
德國通快賣掉金屬3D打印業(yè)務,激光器巨頭為
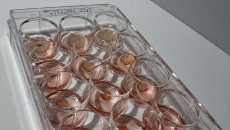
麥吉爾大學初創(chuàng)公司TissueTinker利用3D打印
倒計時9天,2025第四屆中國(杭州)增材制造
安全大于天!珠海某3D打印企業(yè)發(fā)生粉塵閃燃
通知:關(guān)于組織開展2025年中國增材制造優(yōu)質(zhì)

 收藏
收藏 轉(zhuǎn)播
轉(zhuǎn)播 支持
支持 反對
反對


 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351