��(l��i)Դ�������ӡ�c��������
Ŀǰ���w�������ӡ���������֧�ܣ����нY(ji��)��(g��u)��������Ⱦ�L(f��ng)�U(xi��n)���Π��cȱ�ݲ�λ��ƥ��Ⱦ����ԡ���(l��i)�Ա��_��W(xu��)��Carmelo De Maria�F(tu��n)�(du��)��Bioprinting�s־�ϰl(f��)���}�顰Robotic platform and path planning algorithm for in situ bioprinting�������¡�ԓ�F(tu��n)�(du��)�O(sh��)Ӌ(j��)��һ������IMAGObot�ęC(j��)����ԭλ�����ӡƽ�_(t��i)�����������ֱ��ע���ܓp��λ���܉��ڲ�Ҏ(gu��)�t�ı������������S�Y(ji��)��(g��u)��
������B
Ŀǰ������֧�ܵĽM���������R����(y��ng)�����ܵ�һЩ���ơ����w��(n��i)̎����ֲ�����S�M���r(sh��)���ܕ�(hu��)��(d��o)�£�(1)�^�ͺ��^�Y(ji��)��(g��u)���Ɖģ�(2)�����\(y��n)ݔ���˹�ֲ�����ɵ���Ⱦ�L(f��ng)�U(xi��n)��(3)��(du��)�߶ȟo(w��)���h(hu��n)����Ҫ���⣬����Ӌ(j��)��C(j��)���Ӓ����Ź���������ķֱ������ƣ�ʹ���O(sh��)Ӌ(j��)ݔ�벻��(zh��n)�_����(d��o)��������Y(ji��)��(g��u)���Π�����c��(sh��)�Hȱ�ݲ�ͬ��
ԭλ�����ӡ�ǽ�Q������(w��n)�}��һ�N���������������A(y��)���x·�����������ֱ������p�IJ�λ��Ŀǰ��ԭλ�����ӡ������Ҫ�֞��ֳ�ʽ�͙C(j��)���ˡ��ֳ�ʽԭλ�����ӡ�����`�(ji��n)�Σ������p��������(ji��n)�εĽY(ji��)��(g��u)�����C(j��)����ԭλ�����ӡ���Դ�ӡ��N������ϣ������ؽ���(f��)�s�M���Ӵε���������һ���棬���ڙC(j��)���˵�ԭλ��ӡ��������3��(g��)���ϵ����ɶȣ��c�ֳ�ʽ����漰���˹����A(y��)���١�
ԓ�о�ּ���о�5���ɶșC(j��)е������ԭλ�����ӡƽ�_(t��i)�ĝ����;����ԡ�5���ɶȵ�ʹ�ô_���˸���Ĺ������g��ͬ�r(sh��)������(du��)�ڂ��y(t��ng)3���ɶȵ�3D�����ӡ�C(j��)�����S���ϳ��e������ͷǹ⻬�����ϣ�ʹ��ȱ�ݲ�λ�ď�(f��)�s���Π����ͨ�^(gu��)���_���B�m(x��)������īˮ���e�M(j��n)���ޏ�(f��)
�����c����
ԓ�C(j��)����ƽ�_(t��i)�ǻ���BCN3D��5���ɶ��_(k��i)Դ�C(j��)����MOVEO�_(k��i)�l(f��)��(�D1A)����C(j��)е�Y(ji��)��(g��u)����3D��ӡ��FDM�����죬���Ӳ������Arduino�_(k��i)�l(f��)�塣
1.Ӳ��
��(du��)ԭ��MOVEOӲ������Ҫ�����£�
(1)ԭ��(l��i)��ĩ�ˈ�(zh��)�������A��������ע��ÔD��ģ�K��ȡ��(�D1B)
(2)һЩ�B�Ӳ�λ�������O(sh��)Ӌ(j��)�����m��(y��ng)��W(xu��)�������a��(�D1C)
(3)���a�����b��ÿ��(g��)�S�ϣ��������˼��弴���B�������Է���S�o(h��)(�D1D)
(4)�����ʹ��LinuxCNC�_(k��i)Դܛ����(du��)����O(sh��)���M(j��n)��������(j��)(�D1E)

640.png (759.7 KB, ���d��(sh��): 198)
���d����
2022-1-19 10:50 �ς�
�D1 IMAGObot��Ӳ���M�� 2.ܛ��
��LinuxCNC�У�ini�ļ������C(j��)���˵Ļ��A(ch��)���ã������Q���̼��汾���S�Ĕ�(sh��)���͌��Եȡ����m��IMAGOBot�C(j��)���ˣ���ini�ļ��ж��x5��(g��)�S����ÿ��(g��)�P(gu��n)��(ji��)һ��(g��)���C(j��)���˵��\(y��n)��(d��ng)�W(xu��)���O(sh��)�Þ�trivial���@��ζ��ܛ���е�ÿ��(g��)�Sֱ�ӌ�(du��)��(y��ng)�������P(gu��n)��(ji��)���@ʹ�ÿ����O(sh��)��g���a��ÿ��(g��)�S�ĽǶȁ�(l��i)���ƙC(j��)���ˣ���Ч��ʹ����LinuxCNC�ⲿ���\(y��n)��(d��ng)�W(xu��)ģ�K�������S�����x�����D(zhu��n)�\(y��n)��(d��ng)����λ��ȡ����⣬��(du��)ÿ��(g��)�S�O(sh��)����������Ҫ����(sh��)�����/��С���ٶȺͼ��ٶȡ��г̷������w��λ�ú��О飨���w���ٶȺ͚w������Լ�늙C(j��)�(q��)��(d��ng)�O(sh��)�ã����1��ʾ��
640-1.png (76.58 KB, ���d��(sh��): 140)
���d����
2022-1-19 10:50 �ς�
��1 ÿ��(g��)�S��Step Scale(SS)��Encoder Scale(ES)ֵ
ini�ļ�߀������PID�������O(sh��)�ã����w����(sh��)���£�
�� P��I��Dֵ
�� ǰ������(sh��)FF0��FF1��FF2
�� ݔ��ƫ����BIAS
�� ���^(q��)DEADBAND
�� ���ݔ����MAX_OUTPUT
���⣬����HAL߉�����ڿ��Ɖ����{(di��o)��(ji��)����Arduino UNO���cLinuxCNC ���ƵęC(j��)е�ۼ�����һ��
3.·��Ҏ(gu��)��
���˹��������ӡ�^(gu��)�̵������A�Σ���Matlab���_(k��i)�l(f��)��һ��(g��)·��Ҏ(gu��)���㷨����D2��ʾ��ԓ�㷨���Ա������£���ͨ�ô�ӡ�D��ͶӰ����ʾ��ӡ�^(q��)��������ϣ���ÿ��(g��)���c(di��n)��ȡ�c�ֲ��^(q��)�����P(gu��n)������(bi��o)������(y��ng)�ķ�����������(du��)��ÿ��(g��)�c(di��n)��ͨ�^(gu��)�����\(y��n)��(d��ng)�W(xu��)��(l��i)�u(p��ng)���C(j��)е�۵��P(gu��n)��(ji��)�Ƕȣ�����ĩ�ˈ�(zh��)���������ڷ��������ϡ�
640-2.png (733.58 KB, ���d��(sh��): 178)
���d����
2022-1-19 10:50 �ς�
�D2 ��Matlab���_(k��i)�l(f��)��·��Ҏ(gu��)���㷨
���˸��졢��ֱ�^��ʹ���㷨��ʹ�� Matlab App Designer�_(k��i)�l(f��)�ˈD���Ñ����� (GUI)�����������й���֮ǰ�����������㷨�����ܿ�ҕ��ģ�M��ӡ�^(gu��)�̣���D3��ʾ��
640-3.png (380.94 KB, ���d��(sh��): 160)
���d����
2022-1-19 10:50 �ς�
�D3 ��Matlab App Designer�_(k��i)�l(f��)�ĈD���Ñ����� 4.��ӡ�����u(p��ng)�r(ji��)
���C(j��)е��ĩ�˵ĔD���ø��Q��ӛ̖(h��o)�P�����ڴ�ӡƽ�_(t��i)�Ϸ���һ�����������u(p��ng)�r(ji��)ϵ�y(t��ng)�Ŀ��؏�(f��)�Ժ���߷ֱ��ʡ�
�؏�(f��)�Ԝy(c��)ԇ������֪λ�õ�һϵ���c(di��n)��ӡ���飬���y(c��)��ÿ�Μy(c��)ԇ�cǰһ�Μy(c��)ԇ��ƫ��̶ȡ���ӡ·����9��(g��)�c(di��n)�M�ɣ��@Щ�c(di��n)�Է��ΈD�����У��˴����20���ס��C(j��)�����ڏ�һ��(g��)�c(di��n)����һ��(g��)�c(di��n)��·��������10���ף���ÿ��(g��)�c(di��n)��Z = 0̎���|ƽ�_(t��i)��Ȼ���M(j��n)����һ�(xi��ng)�y(c��)ԇ���ɂ�(g��)��Ҫ����x��y����ӡһϵ���c(di��n)��11 ��(g��)�c(di��n)�g��5���ף����y(c��)��ƫ�x����ֱ���ij̶��Լ��@�ɗl����ֱ�ij̶ȡ�ԓ�y(c��)ԇ�؏�(f��)�ɴΡ�
�ֱ��ʜy(c��)ԇ�����f�p�ľ��x��5 mm��2 mm��1 mm��500 ��m��200 ��m��100 ��m����ӡƽ�о����_�����Էֱ澀�l����С���x��ÿ݆�y(c��)ԇ����10��20��30����/����ٶ��؏�(f��)����ʹ��Matlab�ɼ��ͷ����D��
5.ԭλ�����ӡ�ij����y(c��)ԇ
��30% w/v Pluronic Acid��Sigma-Aldrich��Italy����ȥ�x��ˮ�У�һ�N���ڔD��ʽ�����ӡ��ˮ���z���D������ͬ�IJ�Ҏ(gu��)�t�����ϣ��M(j��n)����ԭλ�����ӡ�ij����y(c��)ԇ��ԓ�y(c��)ԇ��10����/��ľ��ٶ��M(j��n)�У��@�������ӡ��(y��ng)�õĵ���ֵ������2-20 ����/�룩�����N���ױ��O(sh��)Ӌ(j��)���в�ͬ��б�ʺ����ʣ���ģ�M��ȱ�ݵ��Ź��^�����������M(j��n)����ԭλ�����ӡԇ�(y��n)��
�Y(ji��)��
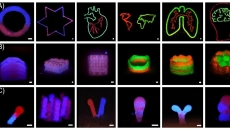
1.�؏�(f��)�Ԝy(c��)ԇ
���ڷ������؏�(f��)�ԵĴ�ӡ�y(c��)ԇһʽ�����M(j��n)�У�ÿ�Μy(c��)ԇ��@ȡ�D�D4A�������ԇ�(y��n)�ĽY(ji��)������������ϵ��ԭ�c(di��n)�̶��ڈD���������c(di��n)��ʹ��MatlabӋ(j��)��9��(g��)�c(di��n)������(bi��o)����2���@ʾ��10mm/s��ӡ�ٶ��µĽY(ji��)���������д�ӡ�ٶ��µĜy(c��)ԇ���@������ƵĽY(ji��)����
640-4.png (129.4 KB, ���d��(sh��): 150)
���d����
2022-1-19 10:50 �ς�
��2 �؏�(f��)�Ԝy(c��)ԇ��ӡˢ�ٶ�10 ����/�룩��
ӡˢ�D����9��(g��)�c(di��n)������(bi��o)�����ף�
2.�����Ժʹ�ֱ�y(c��)ԇ
�D4B�ļtɫ�D���@ʾ��ԭ�c(di��n)��XY����(bi��o)�S������Matlab�����ą�������(bi��o)�S��ʹ�þ��Իؚw�����M�ϔ�(sh��)��(j��)�c(di��n)���õ��ɗlֱ������(du��)ÿ�Μy(c��)ԇ��߀Ӌ(j��)�������P(gu��n)ϵ��(sh��)R2�����u(p��ng)��ģ�͵ă�(y��u)�ӣ����3��ʾ����СR2��0.71������������r�£�����ģ�����Դ��픵(sh��)��(j��)��
640-5.png (43.9 KB, ���d��(sh��): 147)
���d����
2022-1-19 10:50 �ς�
��3 �����Ԝy(c��)ԇ��ӡˢ�ٶ�10 ����/�룩��
ÿ��ԇ�(y��n)��R2ֵ
����(j��)�@Щ��(sh��)��(j��)��Ӌ(j��)����ɗlӡˢ��֮�g�ĽǶ��Լ�ӡˢ���cϵ�y(t��ng)������֮�g�ĽǶȣ����4��ʾ�����Мy(c��)ԇ�Ĵ�ӡ�ٶȶ��@������ƵĽY(ji��)����
640-6.png (64.77 KB, ���d��(sh��): 149)
���d����
2022-1-19 10:50 �ς�
��4 ��ֱ�Ȝy(c��)ԇ��ӡˢ�ٶ�10 ����/�룩��
�u(p��ng)��ӡˢ���c������֮�g�ĽǶ�
3.�ֱ��ʜy(c��)ԇ
��D4C��ʾ�����l���Ա��ֱ����С�g����200um����ˣ��C(j��)�����܉�������200um�ķֱ��ʴ�ӡ�����Мy(c��)ԇ�Ĵ�ӡ�ٶȶ��õ�����ƵĽY(ji��)����
4.ԭλ�����ӡ�ij����y(c��)ԇ
��һ�δ�ӡԇ�(y��n)����һ��(g��)������(g��)��ͬб�
^(q��)��֧�����M(j��n)�еġ���D4D��ʾ���D���Sʼ�K���ִ�ֱ��֧�ܱ��棬�������㷨�Ŀɿ��ԡ�
����ɂ�(g��)�y(c��)ԇ�ڃɂ�(g��)��ͬ�ı������M(j��n)�У���һ��(g��)�����¶Ȅ���׃���ą^(q��)��(�D4E)���ڶ���(g��)������(g��)�����Ͼ��Нu׃���B�m(x��)������(�D4F)�����(du��)��ģ���M(j��n)����ԭλ�����ӡԇ�(y��n)����D4G��ʾ����������r�£�ԓ�㷨���C���������ģ��_���˲��ϵ��B�m(x��)�D����
640-7.png (1.56 MB, ���d��(sh��): 213)
���d����
2022-1-19 10:50 �ς�
�D4 IMAGObot �������u(p��ng)��
���Y(ji��)
���Ľ�B�˙C(j��)����ԭλ�����ӡ�C(j��)��·��Ҏ(gu��)���㷨���O(sh��)Ӌ(j��)���_(k��i)�l(f��)���Կ��������ӡ�^(gu��)�̵������A�Ρ����ߵ����ɶȞ��ڲ�Ҏ(gu��)�t�����ӡ�����ṩ�˿����ԡ����@�N��r�£�ԭλ�����ӡ�����ڲ��õČ���(l��i)�ɞ�F(xi��n)��(sh��)���e�nj�(du��)��������(sh��)�F(xi��n)�����٣���Ƥ�w��ͬ�r(sh��)��ҲҪ�挦(du��)��ȫ�˙C(j��)������������(zh��n)������t(y��)���͙C(j��)���ˌ������g(sh��)��4.0�к���������һ�_(t��i)���f(xi��)�����������ӡ�C(j��)���܉������g(sh��)�A�΅f(xi��)������t(y��)�����M(j��n)�и����_�Ľ��룬���M���p���˞��e(cu��)�`��
�����īI(xi��n)
Gmfa B , Gr A , Afba B , et al. Robotic platform and path planning algorithm for in situ bioprinting[J]. Bioprinting, 2021.
https://doi.org/10.1016/j.bprint.2021.e00139
| 










 �ղ�
�ղ� �D(zhu��n)��
�D(zhu��n)�� ֧��
֧�� ����(du��)
����(du��)
 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351