��(l��i)Դ���L(zh��ng)����G60����(li��n)��
��(j��)Ϥ,�����о�ͨ�^(gu��)�_�l(f��)һ��(g��)�A(y��)�y(c��)ģ�́�(l��i)�z�(y��n)��������Ľ���������^�Y(ji��)��(g��u)�͙C(j��)е����֮�g��(li��n)ϵ��ԓ�A(y��)�y(c��)ģ�Ϳ��Ի���17-4PH���P䓵��^�Y(ji��)��(g��u)��(sh��)��(j��)��(l��i)��Ӌ(j��)�T��O������(qi��ng)��,��������(qi��ng)�Ⱥ͔������L(zh��ng)�ʵ����ܡ�
���о�ͨ�^(gu��)�_�l(f��)һ��(g��)�A(y��)�y(c��)ģ�́�(l��i)�z�(y��n)��������Ľ���������^�Y(ji��)��(g��u)�͙C(j��)е����֮�g��(li��n)ϵ��ԓ�A(y��)�y(c��)ģ�Ϳ��Ի���17-4PH���P䓵��^�Y(ji��)��(g��u)��(sh��)��(j��)��(l��i)��Ӌ(j��)�T��O������(qi��ng)��,��������(qi��ng)�Ⱥ͔������L(zh��ng)�ʵ�����,��������ķ�������Ҫ��(y��u)�c(di��n)�ǿ��ƏV�ԡ���(sh��)��(j��)�ռ���AM�����17-4 PH���P�,����(n��i)������y(c��)ԇ�ͳ����Լ�AM��˾�M(j��n)�еĜy(c��)ԇ�ĬF(xi��n)���īI(xi��n),��ͨ�^(gu��)�D��̎�팦(du��)�D��ߴ�;�����ȡ�M(j��n)�И�(bi��o)��(zh��n)������ȡ���T�羧���ߴ�ֲ��Ϳv�M�ȵ�����,��ͨ�^(gu��)ʹ���˹���(j��ng)�W(w��ng)�j(lu��),���ھ����ߴ���Π������Լ�����(y��ng)�ęC(j��)е����֮�g�������P(gu��n)ϵ���S��,���A(y��)�y(c��)�˾W(w��ng)�j(lu��)֮ǰδ���|������Ʒ������,��
��B
������������������������N�ИI(y��)����(l��i)���ش�׃��ęC(j��)��(hu��)�������a(ch��n)�w�C(j��)�����������Դ���a(ch��n)�Ĝu݆�~Ƭ,�����ٵ����������п��ܳɞ�һ�N׃���Ե����a(ch��n)�^(gu��)��,�����ă�(y��u)�c(di��n)�������s����ԭ��������ǰ�Õr(sh��)�g���p���˲������M(f��i),���܉�(g��u)����(d��)�غ͏�(f��)�s�ĎνY(ji��)��(g��u),���Լ��p���˘�(g��u)����ɺ�ĽM�b�����b�ڲ���Ҫ����,���Լ��܉��ڛ](m��i)�Ђ��y(t��ng)��ˇ��ô��̶�����ɱ�����r��С�����������,�������������죨AM�����S����r����С�������a(ch��n)������x��
���о���Ŀ����ͨ�^(gu��)ʹ�Ô�(sh��)��(j��)�(q��)��(d��ng)��ģ��(l��i)�A(y��)�y(c��)AM�����17-4PH���P�����ęC(j��)е����,������һ�N���ͳɱ��ij���,���ڛ](m��i)���A(y��)�y(c��)��ģ����r�£����ͨ�^(gu��)��(sh��)�(y��n)��ʹ�����a(ch��n)AMϵ�y(t��ng)���ˆT�ѽ�(j��ng)�_�l(f��)�ą���(sh��)��(l��i)�_����������ɹ������Ĺ�ˇ����(sh��),���@�����˿��ٌ�(sh��)ʩAM�Ͷ��Ʋ������ܵĝ���,��ͨ�^(gu��)ʹ�ñ��о��и����ķ��������Ԝp�����_�l(f��)�~������Ľ�������r(sh��)��횑�(y��ng)��ԇ�e(cu��)���Եij̶�,���ԝM��������O(sh��)Ӌ(j��)������Ҏ(gu��)��,��������r�£�ʹ��������M(j��n)���A(y��)�y(c��)����,������,�����Ի��ڹ�ˇ����(sh��)���^�Y(ji��)��(g��u)�͙C(j��)е����֮�g����֪�P(gu��n)ϵ,��ͨ�^(gu��)���ٵČ�(sh��)�(y��n)��(l��i)���a(ch��n)�����ض����쏊(qi��ng)�Ȼ���չ�Ե����,��
�������L(zh��ng)ģ�ͣ��������SԪ���Ԅ�(d��ng)�C(j��)��CA��ģ�ͣ������г߶Ⱦ��˺;������L(zh��ng)ģ�M���ß�vʷ,�,����]�����Ӻ��w�ɺ�,����(d��ng)���ںϾ��ļ�(x��)���ضȽ���Һ�ྀ�ض����r(sh��)���͕�(hu��)�l(f��)�����ӳɺ�,����ԓ��(x��)�����γ��cǰһ���е�������(x��)��������ͬ�ļ�(x��)����,��

640.jpeg (53.18 KB, ���d��(sh��): 111)
���d����
2022-11-14 10:15 �ς�
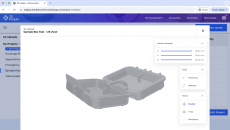
֮ǰ��(b��o)���Ķ�߶ȡ��������(ch��ng)���,������ͨ�^(gu��)��׃�ɺ˅���(sh��)���ɵ�ÿ��(g��)ģ�M�^�Y(ji��)��(g��u)�� 3D ��ʾ,��
�Ӿ��ɘӣ������Ă�(g��)��(g��u)�����ÿ��(g��)��(g��u)�����֞�����(g��)���dȤ�IJɘӌӣ�Ҋ(ji��n)�D��,��Ȼ���M(j��n)һ���xɢ����Ϊ�(d��)���Ӿ�,�������ܾ��w�����Խ�ģ���ֵ�ݔ�롣ÿ��(g��)�Ӿ����ǣ��c��(g��u)���D�ӵĸ߶ȴ�����ͬ��,���w�ش�С��.ÿ��(g��)�w�ػ����w�e��ͨ�^(gu��)DREAM.3D���f,�����������^�Y(ji��)��(g��u)������ԔҊ(ji��n)2.2.1������EVPFFTģ�;���ݔ�롣Ո(q��ng)ע��,���x����D��ʾ��TD-SDƽ���е������Ǟ����о�AM���(n��i)����(du��)�ژ�(g��u)�������׃��,���x��SD-BDƽ���еăɂ�(g��)�ɘӌӣ�һ��(g��)�Լ������܉�E������,����һ��(g��)λ�ڃɂ�(g��)�B�m(x��)܉�E֮�g,����̽�����辀֮�g���ؒ��辀���ܳ��F(xi��n)���κ�׃����
640-1.jpeg (42.86 KB, ���d��(sh��): 92)
���d����
2022-11-14 10:15 �ς�
��ÿ��(g��)���x�IJɘӌӺ����w�e�� 3D ��ʾ,���D��a���C��d���քeָ��A�CD,������(g��)�Ӿ���������Ӗ(x��n)���͜y(c��)ԇ�@�(xi��ng)�����Д�(sh��)��(j��)�(q��)��(d��ng)ģ�͵Ĕ�(sh��)��(j��)����(du��)���� A �� D,��TD-SD ƽ���е����g�ɘӌӱ�ҕ��S�ֈD��,�����ڜy(c��)ԇ��(sh��)��(j��)�(q��)��(d��ng)ģ�����A(y��)�y(c��)����(y��ng)�ɘӈD�ӵ�����(g��)����ӳ�䷽������ܡ�
�@Щ������һЩ����(zh��n)����AM�����ͬ���ֵĹ�ˇ�l�����ܴ��ڲ,���Լ���Ҫ���AM��������е�ȱ��,���M���ѽ�(j��ng)�l(f��)�����S���P(gu��n)���@һ�ض����}���о�������ģ�M�^�Y(ji��)��(g��u)���������,�����ڿ��^���^�Y(ji��)��(g��u)�������A(y��)�y(c��)���S�������əC(j��)���W(xu��)��(x��)ģ�͵Ŀ��wӋ(j��)��ɱ�,��
640-2.jpeg (45.41 KB, ���d��(sh��): 122)
���d����
2022-11-14 10:15 �ς�
���^��ͬ�C(j��)���W(xu��)��(x��)ģ���A(y��)�y(c��)�Ę�(g��u)���� A ��ָʾ�ľS�ӵČ��ԈD�����M����Ч������(qi��ng)�ȣ���
��������ԇ�(y��n)�Y(ji��)���A(y��)�y(c��)�ęC(j��)���W(xu��)��(x��)��ML�������ѳɹ��ؑ�(y��ng)�������������������,��������,�����N��(chu��ng)���Եķ����ѽ�(j��ng)�c�C(j��)���W(xu��)��(x��)ģ�͵�������Y(ji��)�ϣ����A(y��)�y(c��)��y(c��)�����Ԕ�(sh��)��(j��),�����о�����ģ�K�������M(j��n)���A(y��)�y(c��),�������Îׂ�(g��)��ͬ�Ĕ�(sh��)��(j��)���ó�ÿ��(g��)ʧЧ���ڵ��A(y��)�y(c��)��
���ٴ�ӡ����Ҫ׃�w,�������ܳ��e��DED�����ĩ�����ڣ�PBF����ԭ����ͣ���ĩ����ٽz���͟�Դ����,�����⣨L��,���������EB�������x���,���PA������w�����,���GMA������Ӌ(j��)��C(j��)�Ď�����,���@Щ��Դ���\(y��n)��(d��ng)������Ĕ�(sh��)�ֶ��x����(d��o)���Ķ������ӵķ�ʽ�ۻ������Ԙ�(g��u)��3D��(du��)��,��Ȼ��,���۽��ļ����������x���Եؒ�����棬������ĩ�w���ۻ���ÿ��(g��)�B�m(x��)��������Π�,��ֱ����ӡ��3D����,��ͨ�^(gu��)ʹ�÷dz�Сֱ���Ĺ�����С�Ľ����w�������Դ�ӡ�����о���(x��)�Ҿo���g�������ď�(f��)�s���,����DED��,����ĩ��늾��Ę�(g��u)���Ϸ��ṩ������PBF��,����ÿ���ۺϺ����ӱ����ķ�ĩ��,��ͨ�����˵��^�l(f��)߀��(x��)���@Щ���ٴ�ӡ��ˇ�ڟ�Դ����,�������ٶ�,�����e���ʡ���(g��u)���ߴ��������Ҫ���Է���Ҳ������ͬ,��
640.png (37.45 KB, ���d��(sh��): 95)
���d����
2022-11-14 10:15 �ς�
���N���ٴ�ӡ��ˇ��ʾ��D,��
���о���(c��)�����A(y��)�y(c��)17-4PH���P䓵ĸ��N���W(xu��)���ܣ����w����,���@�ǻ��ژ�(g��u)����Ʒ���@�Y(ji��)��(g��u)�D���AM�������ԇ�(y��n)�@�õĔ�(sh��)��(j��)�M(j��n)�е�,��ԓģ�Ͳ����˹���(j��ng)�W(w��ng)�j(lu��)��ʽ�ęC(j��)���W(xu��)��(x��)������������Ԫģ�M,����(d��o)���Ŀ��Ʒ��̻�C(j��)еģ��,������о�����˸��N���W(xu��)���܌��Ե��A(y��)�y(c��),��������ֻ�P(gu��n)ע����һ��(g��)����,��ģ��ݔ�������O������(qi��ng)�ȡ�������(qi��ng)�Ⱥ͔������L(zh��ng)�ʵ��A(y��)�y(c��)ֵ,��
��(sh��)�(y��n),����(sh��)��(j��)�ռ����A(y��)̎��
��(sh��)��(j��)/�ӱ��ɼ�
���о���ʹ�õ�һЩ��(sh��)��(j��)�����^�Y(ji��)��(g��u)�D����@Щ��Ʒ������(y��ng)���W(xu��)���ܵ���ʽ����ǰ�l(f��)�����īI(xi��n)���ռ��ġ��ռ��˘O�����쏊(qi��ng)��,��������(qi��ng)�Ⱥ͔��ё�(y��ng)׃��(sh��)��(j��),����D1��ʾ,���о���ʹ�õĈD��ּ���@ʾ�S�ྦྷ�����Ա��(zh��n)�_��չʾ����(g��)��Ʒ�Ŀɸ����^�Y(ji��)��(g��u)����,���@Щ�^�Y(ji��)��(g��u)����,���羧���ߴ�ֲ�������ȡ��;����Π�,����K�Q���˘�Ʒ�ęC(j��)е����,�����磬һ�N�@�ӵ��P(gu��n)ϵ�ǻ���-����Ч��(y��ng),�����@ʾ�˾����ߴ�Y(ji��)����������(qi��ng)��֮�g�����P(gu��n)��,�����ڿ������˹���(j��ng)�W(w��ng)�j(lu��)���^�Y(ji��)��(g��u)��Ϣ,���������،�(d��o)������P(gu��n)ϵ,���@Щ�P(gu��n)ϵ�γ����A(y��)�y(c��)�^�Y(ji��)��(g��u)���ԵĻ��A(ch��)��
640-1.png (280.02 KB, ���d��(sh��): 108)
���d����
2022-11-14 10:15 �ς�
�D1 ���ռ����f(shu��)���w���ΑB(t��i)���@��Ƭʾ��,��
�����Ʒ�Ƃ�
��(sh��)���Ʒ��(l��i)�ԃɼҹ�˾��Digital Metal��Innovative 3D Manufacturing,�������y(c��)ԇ��23��(g��)��Ʒ,������8��(g��)��(l��i)��Digital Metal,��15��(g��)��(l��i)��Innovative 3D Manufacturing��Digital Metal�Ę�Ʒ����ճ�Y(ji��)�����䷨��(g��u)��,������ƽ�淽��(g��u)����Ҋ(ji��n)�D2��,��Innovative 3D Manufacturing�Ę�Ʒʹ�û����c(di��n)�ӟ��AM��ˇ��Renishaw AM����(g��u)�����傀(g��)��Ʒ�քe��ƽ��,����ֱ�ʹ�ֱ����(g��u)����Ҋ(ji��n)�D2��,��
640-2.png (110.98 KB, ���d��(sh��): 100)
���d����
2022-11-14 10:15 �ς�
�D2 ��(g��u)������ʾ����
�ڱ��y(c��)��Ʒ�ijߴ���Ƭ���x��ɂ�(g��)�^(q��)���(l��i)�z�y(c��)�^�M���ΑB(t��i):һ��(g��)�����A�օ^(q��),��һ��(g��)�������,����D3��ʾ��
640-3.png (114.5 KB, ���d��(sh��): 105)
���d����
2022-11-14 10:15 �ς�
�D3 ����ԇ���^�Y(ji��)��(g��u)�����İ��c(di��n),��
ʹ�ù�W(xu��)�@�R�ɼ��ĈD����D4�͈D5,���@�ɷ��D��քe���픵(sh��)�ֽ��ٺ̈́�(chu��ng)��3D����Ę�Ʒ������,�����鹫˾��(n��i)���y(c��)ԇ�ĽY(ji��)��,����Ƶث@���˔�(sh��)�ֽ��ٹ�����55���D��ԓ��(sh��)��(j��)���Ęӱ��D����D6��ʾ,��
640-3.jpeg (107.77 KB, ���d��(sh��): 116)
���d����
2022-11-14 10:15 �ς�
�D4 ��(sh��)�ֽ����g�̘�Ʒ�D��,��
640-4.jpeg (84.17 KB, ���d��(sh��): 113)
���d����
2022-11-14 10:15 �ς�
�D5 ��(chu��ng)��3D������g�̘�Ʒ�D��
640-5.jpeg (85.22 KB, ���d��(sh��): 102)
���d����
2022-11-14 10:15 �ς�
�D6 Digital Metal�ṩ���g�̘�Ʒ�D��
����ԇ�(y��n)��(sh��)�(y��n)
���о��еĘ�Ʒʹ��ASTM��(bi��o)��(zh��n)E8/E8M-16aϵ1�M(j��n)�ЙC(j��)е����ԇ�(y��n),������(j��)ASTM��(bi��o)��(zh��n)E8/E8M-16aϵ1,��ʹ��United Test Systems 10kNͨ��ԇ�(y��n)�C(j��)�y(c��)ԇ��Ʒ,��ʹ��12.7 mm/min��0.5 inch/min���đ�(y��ng)׃�ʡ�ʹ�����L(zh��ng)Ӌ(j��)��ۙǰ3%�Ĺ��̑�(y��ng)׃,�����ಿ��ʹ�ÿ��հ�λ�ƺ���Ҏ(gu��)���հѽ���ęM����e���P(gu��n)ϵ�M(j��n)��Ӌ(j��)��,��������y(c��)ԇϵ�y(t��ng)��ݔ���Ы@��ÿ��(g��)�y(c��)ԇ��Ʒ�Ĺ��̑�(y��ng)��-��(y��ng)׃������Ȼ���D(zhu��n)�Q���挍(sh��)��(y��ng)��-��(y��ng)������,�����u(p��ng)����Ʒ�ęC(j��)е����,�����ё�(y��ng)׃�����������������ԵĶ������C(j��)е������ȡʾ����D7��ʾ,��
640-6.jpeg (44.51 KB, ���d��(sh��): 112)
���d����
2022-11-14 10:15 �ς�
�D7 �đ�(y��ng)��-��(y��ng)׃��������ȡ���W(xu��)����,��
�C(j��)е���ܵĔ�(sh��)��(j��)�(q��)��(d��ng)��ģ
�����ΑB(t��i)������ȡ
ʹ�ð��b��쳝�(j��)��MorphoLibJ����ĈD��̎��ܛ��ImageJ��(du��)�ɼ��ĈD���M(j��n)��̎�������г�ʼ̎�������ɂ�(g��)��Ҫ���E���@�Ï������D(zhu��n)�Q���ı�������,���Լ��@�ô����^�Y(ji��)��(g��u)�D���о���߅��ķ�ˮ�X�����D��֮�g��̎�텢��(sh��)׃���ܴ�,������؏�(f��)���^(gu��)�̲��ܫ@�þ��_�ľ���D��,��
��(du��)�ڷ�EBSD�D��ʹ�á��������ֵ�������M(j��n)�зָ�,��ԓ���������L���ض��^(q��)���߅��,���@Щ�^(q��)�������ֵ�c���܇��h(hu��n)�����ܴ����Գ��^(gu��)���S�����ݲ�,����(du��)��EBSD�D��,��ʹ�����cMorphoLibJ�����ͬ�Ĺ��ߡ�
��D8��ʾ,���ڌ�(du��)��(sh��)��(bi��o)�ȣ���log����y− ��0��vs.log��d����,��������(qi��ng)��log����y− ��0���S������ֱ��log��d�������Ӷ����ԜpС�����,���������(du��)��(sh��)���������x��ֱ���D�е������ς}(c��ng),���tÿ��(g��)�ς}(c��ng)�����ڻ���-����Ч��(y��ng)��(d��o)�µ�������(qi��ng)�ȵ��A(y��)�ڽ��͌���ͬ��ԓ���������x��ֱ���D�}(c��ng),��
640-7.jpeg (38.94 KB, ���d��(sh��): 108)
���d����
2022-11-14 10:15 �ς�
�D8 ��(du��)��(sh��)�߶��µ�Hall�CPetch���������x��������,��
�ڈD9�У�ͨ�^(gu��)��(du��)����(g��)��(sh��)��(j��)���е��w���M(j��n)��Ӌ(j��)��(sh��),���@ʾ���w���ߴ�ֱ���D,��
640-8.jpeg (50.57 KB, ���d��(sh��): 115)
���d����
2022-11-14 10:15 �ς�
�D9 ����(g��)��(sh��)��(j��)����ֱ���Dʾ����
�ڈD10��,�����^�˼�(x��)�L(zh��ng)�����ͽ��A�ξ���,����D��ʾ���@�ɂ�(g��)�A��������(du��)�@�ɂ�(g��)�������F(xi��n)����ͬ��ֵ,������ṩ���c�����ߴ�ֱ���D���a(b��)�ľ����Π���Ϣ,���@Щ�A�������c�C(j��)е����׃��֮�g�����P(gu��n)�Կ���ͨ�^(gu��)��(sh��)��(j��)�(q��)��(d��ng)ģ�́�(l��i)�W(xu��)��(x��),������,������ÿ��(g��)�^�Y(ji��)��(g��u)�D����ȡ13��(g��)�����ΑB(t��i)��������������11��(g��)����ֱ��ֱ���D�}(c��ng)�ĸ���,���D�������о�����ƽ���v�M���Լ�ƽ�����L(zh��ng)�cֱ���ȡ�
640-9.jpeg (64.69 KB, ���d��(sh��): 110)
���d����
2022-11-14 10:15 �ς�
�D10 �A�������D��,��
�C(j��)����A(y��)�y(c��)����(j��ng)�W(w��ng)�j(lu��)
����һ�M�A(y��)�y(c��)����������,���v�M�ȵȣ���(g��u)����(sh��)��(j��)�(q��)��(d��ng)ģ�����A(y��)�y(c��)Ŀ��(bi��o)�����C(j��)е���ܣ��ĸ������v��һ��(g��)�ؚw��(w��n)�}������ʹ�ö�N�O(ji��n)���C(j��)���W(xu��)��(x��)ģ�́�(l��i)���,�,����]�����īI(xi��n)������ԇ�(y��n)�Ы@�õĔ�(sh��)��(j��)�ӱ���(sh��)�����ޣ�ͨ�^(gu��)���������ΑB(t��i)������ȡ����������ȡ��ÿ��(g��)����߅��D�֞�һϵ���ӈD���(l��i)�U(ku��)չ��(sh��)��(j��)��,�����@�(xi��ng)������,��Levenberg�CMarquardt�㷨�������_�l(f��)Ӗ(x��n)������(sh��)����(d��ng)��(y��ng)���ڷǾ����A(y��)�y(c��)��(w��n)�}�r(sh��),��ԓ�㷨��(qi��ng),������m���ڴˑ�(y��ng)�á�
�ڌ�(sh��)�(y��n)�ˮ�(d��ng)�[�ع�(ji��)�c(di��n)�Ĕ�(sh��)��׃���r(sh��)UTS�A(y��)�y(c��)������֮��,��ʹ���˾���55��(g��)��(ji��)�c(di��n)��ǰ����(j��ng)�W(w��ng)�j(lu��),��ԓ�W(w��ng)�j(lu��)�ڲ��^(gu��)�ȔM�ϔ�(sh��)��(j��)����r��(sh��)�F(xi��n)�˺����ľ������`�RMSE������5��140��(g��)��(ji��)�c(di��n)֮�g��5��(g��)��(ji��)�c(di��n)��������(du��)�W(w��ng)�j(lu��)�M(j��n)�Мy(c��)ԇ,����(d��ng)ʹ��Levenberg�CMarquardt�㷨�r(sh��),���l(f��)�F(xi��n)�����ڴ�s45��90��(g��)��(ji��)�c(di��n)֮�g��(w��n)������D11��ʾ,����K,���x����55��(g��)��(ji��)�c(di��n)��ֵ����?y��n)����ӽ��ɿ�һ�µķ�(w��n)���^(q��)����¶�,���@��ζ��ʹ��55��(g��)��(ji��)�c(di��n)��ֵ���Ԯa(ch��n)��һ�µĽY(ji��)��,��������(hu��)���^(gu��)�ȔM��ģ�ͺ͓p�����ܵĝ���Σ�U(xi��n)��
640-10.jpeg (22.08 KB, ���d��(sh��): 110)
���d����
2022-11-14 10:15 �ς�
�D11 ʹ��5�C140��(g��)��(ji��)�c(di��n)�ľW(w��ng)�j(lu��)����,��
�Y(ji��)����ӑՓ
�����x������(j��ng)�W(w��ng)�j(lu��)�Y(ji��)��(g��u),����ȡ�������͜y(c��)���ģ�����īI(xi��n)����ȡ�ģ����W(xu��)���ܣ��քeӖ(x��n)���˘O������(qi��ng)�ȣ�UTS��,��������(qi��ng)�ȣ�YS���͔��ё�(y��ng)׃������(g��)�A(y��)�y(c��)ģ��,��ͨ�^(gu��)�ӈD��ü�����(qi��ng)�Ĕ�(sh��)��(j��)�����ֳ�Ӗ(x��n)�������(y��n)�C�������˷�ֹ��(sh��)��(j��)й©,����(sh��)��(j��)��������ӱ��ָ�,���@��ζ������x���ˡ�����ӱ��Ƃ䡱�����И�(g��u)���Ęӱ��M(j��n)���(y��n)�C���t��(l��i)��ԓ����ӱ��������ӈD��(sh��)��(j��)�c(di��n)���������(y��n)�C�������,��Ӗ(x��n)��ģ�͌���Ӗ(x��n)�����̏�δҊ(ji��n)�^(gu��)���~������ӱ��Ĕ�(sh��)��(j��)�c(di��n)���M(j��n)���(y��n)�C,���s60%����ӱ��Ĕ�(sh��)��(j��)�c(di��n)����Ӗ(x��n)��������40%�ӱ��Ĕ�(sh��)��(j��)�����(y��n)�C,��
��(j��ng)Ӗ(x��n)������(j��ng)�W(w��ng)�j(lu��)��(du��)UTS���A(y��)�y(c��)�Y(ji��)����D11��ʾ,���ĈD12�п��Կ����������ӈD���A(y��)�y(c��)�Ę�(bi��o)��(zh��n)ƫ���γɵ����Ņ^(q��)�gʼ�K�����挍(sh��)�y(c��)����UTSֵ����(sh��)�ĺھ���,���@�ṩ���cUTSģ�����P(gu��n)�IJ��_���Ե�����,��ֵ��ע����ǣ���(du��)��һЩ�ӱ�,�����Ņ^(q��)�g�ƺ��܌�,���@��Ҫ����?y��n)��@Щ��Ʒ���^�Y(ji��)��(g��u)�����������ü����ӈD���@ʾ����ͬ�ľ����ΑB(t��i),���@ʹ���ӈD���A(y��)�y(c��)��ɢ,��Ȼ�����ӈD���ƽ���A(y��)�y(c��)��(du��)�ֲ�׃����̫����,�����ʼ�K�ӽ��挍(sh��)UTSֵ,���@���Ǟ�ʲô�ӈD���A(y��)�y(c��)��(y��ng)ԓ���ۺ��Ԉ�(b��o)�濂�w�C(j��)е���ܵ�ԭ��
640-11.jpeg (28.8 KB, ���d��(sh��): 97)
���d����
2022-11-14 10:15 �ς�
�D12 �O������(qi��ng)�ȵ���(j��ng)�W(w��ng)�j(lu��)�A(y��)�y(c��),��
UTS�A(y��)�y(c��)�ɹ�����ͬ����(j��ng)�W(w��ng)�j(lu��)�Y(ji��)��(g��u)��Ӗ(x��n)��������(y��ng)����������(qi��ng)���A(y��)�y(c��),����D13��ʾ,��������(qi��ng)���A(y��)�y(c��)��������Ȼ�ஔ(d��ng)�ã��M���cUTS�A(y��)�y(c��)��������½�,��
640-12.jpeg (28.98 KB, ���d��(sh��): 105)
���d����
2022-11-14 10:15 �ς�
�D13������(qi��ng)�ȵ���(j��ng)�W(w��ng)�j(lu��)�A(y��)�y(c��),��
����ё�(y��ng)׃���A(y��)�y(c��)��D14��ʾ,�����ё�(y��ng)׃��ʾ���������쑪(y��ng)�����ѵĕr(sh��)�g,���Ķ��y(c��)�����ϵ����ԡ����ё�(y��ng)׃�A(y��)�y(c��)��Ӗ(x��n)�������(y��n)�C���϶����F(xi��n)�����õĜ�(zh��n)�_��,��
640-13.jpeg (29.25 KB, ���d��(sh��): 108)
���d����
2022-11-14 10:15 �ς�
�D14 ���ё�(y��ng)׃����(j��ng)�W(w��ng)�j(lu��)�A(y��)�y(c��),��
�mȻ���ϽY(ji��)�����ǻ��ھ��І�(g��)�[�،ӵ�ǰ����(j��ng)�W(w��ng)�j(lu��)�������S��������A(y��)�y(c��)�ؚw��(w��n)�}�ıO(ji��n)���C(j��)���W(xu��)��(x��)���g(sh��),�,����Կ��������Իؚwģ�͵ı��F(xi��n)���@���������C(j��)���W(xu��)��(x��)ģ��,����?y��n)����o(w��)����ݔ��׃������K��������֮�g�ķǾ���,���c��(j��ng)�W(w��ng)�j(lu��)��ȣ��o(w��)Փʹ�úηN��͵ĺ�,��֧�������C(j��)��SVM����ģ���Dz��ɹ���,���@����SVM��ģ�����m���ڴˑ�(y��ng)�õIJ���,����(du��)�ھ��Ѓɂ�(g��)������(g��)�[�،ӵ���(j��ng)�W(w��ng)�j(lu��)���������[�ع�(ji��)�c(di��n)�Ĕ�(sh��)���c����ģ�ʹ�����ͬ,�����ͨ�^(gu��)ʹ�W(w��ng)�j(lu��)����,�������ܛ](m��i)�����@���ơ����,�����І�(g��)�[�،ӵ���(j��ng)�W(w��ng)�j(lu��)��������ģ�ͣ�����Y(ji��)��(g��u)����(ji��n)�ζ�����ȡ,������S�C(j��)ɭ��ģ���ڜ�(zh��n)�_�A(y��)�y(c��)UTS����Ҳ��(qi��ng)��,����?y��n)���?00�Ø���S�C(j��)ɭ���_(d��)�����c����ģ����ͬ��RMSEˮƽ,����(d��ng)��(y��ng)����ԓ��(sh��)��(j��)���r(sh��)���S�C(j��)ɭ�ֺ���(j��ng)�W(w��ng)�j(lu��)���Զ��dzɹ���,���b�ڮ�(d��ng)ǰ��(sh��)��(j��)�����|(zh��),���S�C(j��)ɭ�ֿ�����һ��(g��)�m�õ�ģ�͡�Ҳ�����f(shu��),����δ��(l��i),���S�������׃��֮�g���P(gu��n)ϵ���ӏ�(f��)�s��ģ���п��ܕ�(hu��)������ȫ��ĈD��(sh��)��(j��),����(j��ng)�W(w��ng)�j(lu��)���ܕ�(hu��)���C�����߿ɔU(ku��)չ��,��
640-14.jpeg (32.79 KB, ���d��(sh��): 114)
���d����
2022-11-14 10:15 �ς�
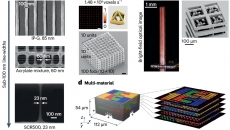
һ��(g��)���Мض��ݶ����������뻯 3D �۳أ��������� kMC �ϳ��^�Y(ji��)��(g��u),��
��SPPARKS��(d��ng)���W(xu��)���ؿ��_��kMC����������(chu��ng)����һ��(g��)�Ñ��ӳ���,���Խ�����AM̎�����g�ֲ���Դ�Ķ���f��ԓ�ľ����ø��M(j��n)�IJ���-���ؿ��_����(l��i)ģ�M���������^(gu��)���еľ������L(zh��ng),�����������ϵ�һ�Mվ�c(di��n)�M����ģ�M��,������ÿ��(g��)վ�c(di��n)����������һ��(g��)�����������Ԙ�(bi��o)�R(sh��)�䌦(du��)ԓ������(bi��o)�R(sh��)���ض����ȵijɆT�Y��,�����ƺͲ�ͬ�������������ж��x��ģ�M�ľ����Y(ji��)��(g��u)�Ϳ�����,��ģ�M�r(sh��)�g�����ؿ��_���L(zh��ng)��MCS����ʾ��һ��(g��) MCS ��(du��)��(y��ng)����ÿ��(g��)����վ�c(di��n)��ÿ��(g��)����̎�Lԇ�����ؿ��_�������D(zhu��n),���mȻ���y���x�c����r(sh��)�g�Ĵ_���P(gu��n)ϵ,������������һ��(g��)����(sh��)�������P(gu��n)�ġ��ֲ���Դʹ��Ҏ(gu��)����ģʽͨ�^(gu��)���M(j��n)�ЖŸ�,������ģ�M�ۻ�,����(d��ng)һ��(g��)λ�c(di��n)λ�ڟ�Դ�ġ��۳ء���(n��i)�r(sh��)�������������S�C(j��)��,�������̺;������L(zh��ng)�l(f��)�����۳��܇��ğ�Ӱ푅^(q��)��HAZ����,����(x��)�L(zh��ng)�ľ����������ݶȵķ������L(zh��ng)�����a(ch��n)�����В�����Ԛvʷ�Լ���Դ���гߴ���Π�ĸ����Զྦྷ�^�Y(ji��)��(g��u)��
�Y(ji��)Փ
���Ľ����˻����^�Y(ji��)��(g��u)���ԵĔ�(sh��)��(j��)�(q��)��(d��ng)ģ��,�����A(y��)�y(c��)ͨ�^(gu��)�������옋(g��u)����17-4H���P䓲��ϵ����W(xu��)����,���A(y��)�y(c��)��������(g��)��(l��i)Դ�Ĕ�(sh��)��(j��)����(n��i)������y(c��)ԇ�ͳ��F(xi��n)���īI(xi��n)�Լ��������칫˾Digital Metal��Innovative 3D manufacturing,��ͨ�^(gu��)���ÏĈD���Ќ�(d��o)���ľ����ߴ���Π�����,������ANN��(d��o)�����������c�y(c��)ԇ���^�쵽����������֮�g���P(gu��n)ϵ��
640-15.jpeg (84.12 KB, ���d��(sh��): 99)
���d����
2022-11-14 10:15 �ς�
a�Ă�(g��)�ϳ��^�Y(ji��)��(g��u)������ҕ�D,��ÿ��(g��)ͨ���Ē��跽����ָʾ,��b��(du��)��(y��ng)��ģ�M����(sh��)��
���N��ͬ�������ܵĽY(ji��)�����˹���,����(du��)�ژO������(qi��ng)��,��ԓģ���܉��A(y��)�y(c��)�挍(sh��)ֵ��ƽ���`���30MPa��ƽ���挍(sh��)UTSֵ��3.1%������(du��)��������(qi��ng)��,��ԓ�A(y��)�y(c��)ƽ�����挍(sh��)ֵ��33MPa�ԃ�(n��i)��ƽ���挍(sh��)������(qi��ng)��ֵ��4.5%��,�����(du��)�ڔ��я�(qi��ng)��,���c�挍(sh��)ֵ���挍(sh��)FS��11%���,�����ȣ��A(y��)�y(c��)ֵ�cƽ�����L(zh��ng)�ʞ�0.7%���^��ֵ��ƥ��,������,�������A(y��)�y(c��)�������������Ņ^(q��)�g��(n��i)���@Щ�Y(ji��)������,�����н��������W(xu��)�����A(y��)�y(c��)ģ�Ͷ����Ќ�(sh��)�õĜ�(zh��n)�_�ԺͿɿ���,��
�@�N�������P(gu��n)�I��(y��u)��(sh��)����ģ�͵Ŀ��ƏV�ԡ�ͨ�^(gu��)���^�Y(ji��)��(g��u)������֮�g�γ�(li��n)ϵ,�����Ը������������ʹ�õĹ�ˇ�����,��ԓ�������ԽY(ji��)���ɶ�N������AM�͂��y(t��ng)��������(g��u)���Ęӱ���(sh��)��(j��),���������V�������칤ˇ��������������A(y��)�y(c��)�Ĝ�(zh��n)�_�ԺͿɿ��ԡ�ԓ����߀���m���ڸ��V���Ľ���,���ԫ@����ƵĽY(ji��)��,����¶�ڸ�����(l��i)Դ�Ĕ�(sh��)��(j��)��������A(y��)�y(c��)����,��
��(l��i)Դ��Data-Driven Modeling of Mechanical Properties for 17-4 PH Stainless Steel Built by Additive Manufacturing, Integrating Materials and Manufacturing Innovation, 10.1007/s40192-022-00261-8
�����īI(xi��n)��Bailey TJ (2001) Prediction of mechanical properties in steel heat treatment process using neural networks. Ironmak Steelmak 28(1):15�C22. https://doi.org/10.1179/irs.2001.28.1.15
|









 �ղ�
�ղ� �D(zhu��n)��
�D(zhu��n)�� ֧��
֧�� ����(du��)
����(du��)
 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351