|
2022��12��6�գ��ϘO�ܫ@Ϥ�����ô����ɸ��םɴ�W(xu��)�Ĺ��̎��_�l(f��)��һ�Nʹ���p�C(j��)е�۴�ӡ 3D �Y(ji��)��(g��u)��Ӯa(ch��n)Ʒ�ķ�����
���w���ԣ�ԓ���g(sh��)��һ�_�C(j��)����ʹ�û��ڝ{�ϵ�ֱ��īˮ���� (DIW) �����M(j��n)�д�ӡ����һ�_ʹ�� FDM�����_�C(j��)е�۲��Ź������������S��Ӯa(ch��n)Ʒ��
ԓ�о����}�顰ͨ�^����C(j��)���� 3D ��ӡ��(sh��)�F(xi��n) 3D �Y(ji��)��(g��u)��ӌW(xu��)����Փ�ı��l(f��)����Advanced Materials Technologies �ڿ��ϡ�

��Ļ�؈D 2022-12-06 204154.jpg (94.22 KB, ���d�Δ�(sh��): 66)
���d����
2022-12-6 20:43 �ς�
���S ABB �C(j��)е�۳��e�� PLA ���όӣ��γ��˽Y(ji��)��(g��u)�����w��ꇡ�ABB ʹ���� Typhoon ���L�z�D���C(j��)��
�ڴ�ӡƷ���γɌ�(d��o)�܉���Ľ��|(zh��)��δ�̻����y�{�Ƴɣ�����һ���C(j��)�������S Fanuc �C(j��)е��ʩ�ӡ��{���Ǐİ��b�� Fanuc �ϵ� Musash DIW ��ӡ�^��ӡ�����ġ�
1.jpg (106.32 KB, ���d��(sh��): 78)
���d����
2022-12-6 20:43 �ς�
���p�C(j��)���ۣ�һ�_�����y�{��һ�_���� PLA�����DƬ��Դ�����ɸ��םɴ�W(xu��)��
ԓ�O(sh��)��߀�܉�?q��)��F(xi��n)��ӡ���όӺ������ϱ���ӡˢ�y�{���~������όӿ��Գ��e���y�����γɹ�����Ƕ��ʽ�����������ҿ���ӡˢ܉�����������ཻ��
��(d��ng)�ӟ�������c�D���ĺ�������|�r������(d��o)�º�������ٹ̻����о��ˆT����Q���Ԅӟ��Y(ji��)��܉����ÿ 10 ���� 14.5 �� ����С���̻���
�p�C(j��)����
�@�N�p�C(j��)е�۴�ӡ�������и�������ɶȣ�ʹ���ڛ]�� FDM ��ӡ�е��͵�֧�β��ϵ���r�������(f��)�s�Y(ji��)��(g��u)�O(sh��)Ӌ�ɞ���ܡ�ԭ�t�ϣ���߀�������S�����ܶȵ��·���@���w�e���g������r��������ġ�
�ڴ�ӡ�^���У��y�{��늌�(d��o)��ȡ�Q�ڏğ� PLA �D(zhu��n)�Ƶ����������@��ȡ�Q�� FDM ��ӡ����(sh��)���@Щ����(sh��)��������ضȡ���ӡ�ٶ��Լ���ӡ�^�ͻ���֮�g���g϶��
2.jpg (78.35 KB, ���d��(sh��): 98)
���d����
2022-12-6 20:43 �ς�
���y�{���l(f��)�̻������DƬ��Դ�����ɸ��םɴ�W(xu��)��
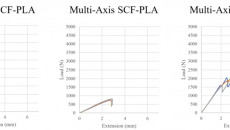
������ 14.5 �� ���ڴ�ӡ�C(j��)�^��(n��i)���ض���� (210 ��C)���ٶ����� (1 mm s−1) ����С�g϶ (1 mm) �r�@�õġ�
�p�C(j��)е�ۈF(tu��n)�չʾ�˾���늸к���݂��й��ܵ��p�����O(sh��)Ӌ�����������Ĵ�ӡ�����⣬߀ӡˢ�˶��� PCB���������S PCB �O(sh��)�以�B����ͬ�ɫ�� LED ����늳ع����������ʾĿ�ġ�
3.jpg (75.31 KB, ���d��(sh��): 73)
���d����
2022-12-6 20:43 �ς�
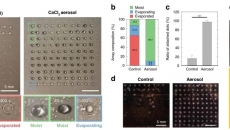
�������������еĉ������С����DƬ��Դ�����ɸ��םɴ�W(xu��)��
���ɸ��םɴ�W(xu��)�C(j��)�ϵ�y(t��ng)���̌W(xu��)Ժ���� Woo Soo Kim �f������(d��ng)�ҿ������� 6 �S�C(j��)���˅f(xi��)ͬ���Ӻ�늻����r���Ҍ���܇�b�侀�ϵĄӑB(t��i)�����ܸ��dȤ���҂�?y��u)�ʲô�����Ԍ��f(xi��)��ʽ����C(j��)�����\(y��n)�ӎ������� 3D ��ӡ���磿���� 2020 ��������@���뷨����҂��Ãɂ��f(xi��)���C(j��)����չʾ���@�N���������� 3D ��ӡ��Ӯa(ch��n)Ʒ�����S�Y(ji��)��(g��u)���ɡ��҂����Ņf(xi��)���C(j��)����3D��ӡ��������3D��ӡ���g(sh��)�ĽY(ji��)��(g��u)�����_��һ�l��·������
| 








 �ղ�
�ղ� �D(zhu��n)��
�D(zhu��n)�� ֧��
֧�� ����
����
 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351