|
��(d��o)�x����ÿ�� 2 �����ٶ����M�ęC���� �����������e�죬���Ǯ��@���C���˃H������^�l(f��)�z�Č��ȕr,����ô�������Ƽo䛵����M�ٶ���,��
2023��4��13�գ��ϘO�ܫ@Ϥ,�������նɴ�W(xu��)���о��ˆTʹ���� 3D ��ӡ��(chu��ng)����һ�������Ӿ�C����,���@��ʹ�ö���ϴ�ӡ���͙C���˱��b�������܉��m��(y��ng)�h(hu��n)����ˮ���zβ�͡�
�@������Ӿ�C���˵��_��(chu��ng)��,���նɴ�W(xu��)�Cе����ϵDavid Cappelleri�Ľ����f�����҂��о��Ƅ��͙C�����ѽ�(j��ng)��10��15��ĕr�g��,��������O(sh��)Ӌ�����������������,����ο�������,������K���ʹ���������҂���չ�_�˳�ֵ�̽��,������@Щ�C���˷dz�С,���҂��o���B��늳ػ��κ�������͵ă�(n��i)���Դ�������҂�ʹ�ôň����ⲿ���������,�,���
�@��о����}�顰����Փ�ı��l(f��)���ڡ�IEEE Robotics andAutomation Letters���ڿ��ϡ�

��Ļ�؈D 2023-04-13 211700.jpg (121.1 KB, ���d�Δ�(sh��): 71)
���d����
2023-4-13 21:28 �ς�
��3D��ӡ����Ӿ�C����
��(j��ng)�^�����̽��,��Cappelleri �ĈF��ѽ�(j��ng)����������ڻ�Y(ji��)�c�з��L���͙C����,������߀���о�����ؓ�d�ض�ˎ����t(y��)�ÙC���ˡ����^,���������µ�����(zh��n)���DZ��ĵ����ǡ�����Ӿ�C����,��
Cappelleri �f�����҂��F(xi��n)�����ڇLԇ�_�l(f��)һЩ�����M���͙C����ԭ�ͣ��������H�DŽ������w,�����ҿ���׃��,����׃���m��(y��ng)�h(hu��n)���,���
�����F������_�l(f��)���͙C����,������Ӿ�C���ˣ�������һ��Ӳ���^��һ�������ε�ܛˮ���zβ��,������ģ�¼���,�����Ӻ���������F(xi��n)���е���Ӿ�О顣���������� 3D ��ӡ���g(sh��)������н����ܛӲˮ���z�^(q��)���β��,��ʹ�C�����܉����(j��)��ͬ�����w�h(hu��n)���������m��(y��ng)�О�,�������Q֮���������m��(y��ng)������͙C���� (HAMMR),��
�Ӯ�1.gif (1.46 MB, ���d�Δ�(sh��): 103)
���d����
2023-4-13 21:28 �ς�
Cappelleri ����ҵČW(xu��)�����@ƪ�о�Փ�ĵ����� Liyuan Tan ��ʿ�f����ˮ���z��һ�N��ܛ�IJ���,����������(j��)��ͬ�Ĵ̼��Բ�ͬ�ķ�ʽ�cˮ�l(f��)������(y��ng),��һЩˮ���z���dһ����Û��Ҳ��һЩ����ˮ��,���@��ζ�������ų�ˮ,������㌢�@Щ��ͬ��ˮ���z������ã�������Ť�����γ������Π�,���@�����ڙC���˸�����Ƅ�,����
��Ļ�؈D 2023-04-13 212116.jpg (116.34 KB, ���d�Δ�(sh��): 82)
���d����
2023-4-13 21:28 �ς�
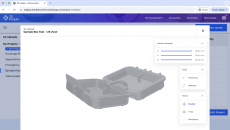
���� 3D ��ӡ���S����N���ϼ��ɵ�һ���͙C������,�������Բ�ͬ�Ƕ��γ����m��(y��ng)Ť������β�IJ�ͬ�N�ˮ���z,��
������һ�����}��ˮ���zһ����ܛ��,�������^һ����Ӳ��,������������С�ij߶����B��������Tan���˱�ʾ�����҂��뵽�˽Y(ji��)�σɷN��ͬ�������켼�g(sh��)���뷨,���^����ʹ�ù�̼��g(sh��)�����ģ��@��һ�N����Ӳ�Y(ji��)��(g��u)�Ă��y(t��ng)����,��Ȼ����β��,���҂�ʹ����һ�N�Q���p���Ӿۺϵ� 3D ��ӡ���g(sh��)���҂�����ʹ��Nanoscribe PhotonicProfessional GT2�b�Á����,�,���
�о��ˆT���նɴ�W(xu��)̽�����@�IJ��˼{���g(sh��)���Ą�(chu��ng)�����@���͙C���ˣ��@�njW(xu��)�g(sh��)�������M���{�����쌍���֮һ,��
��Ļ�؈D 2023-04-13 212050.jpg (356.28 KB, ���d�Δ�(sh��): 94)
���d����
2023-4-13 21:28 �ς�
�����˼{���g(sh��)����
Cappelleri �f�����҂���������@Щ�͙C���˵Č��ȃH�� 10 �� 50 ��,����s������^�l(f��)�Č��ȣ��㲻�܃H�Hʹ����ĸ����˨���B���@�ɲ����b��,���κηN��s�|(zh��)���۹����c���sɢ�ŷ۶������ęC����,��ʹ�� Nanoscribe 3D ��ӡ�C���҂����H�܉��B�Ӄɲ����b��,��߀��ᘌ���ͬ�h(hu��n)����������β�����O(sh��)Ӌ,����
����������ˮ���z�IJ�ͬ�Ƕ��Լ�ˮ�ͮ������IJ�ͬ�h(hu��n)���M���ˌ��,��һ�������ҵ������_�ĽM��,��HAMMR ����Ӿ�ٶȾͳ������������A(y��)�ڡ�Tan �f�����@���C�����_����ÿ�� 8.1 �����w�L�ȵ��ٶ�,���@���κάF(xi��n)�Ј�������m��(y��ng)��Ӿ�͙C���˵�����ٶ�,�,���
�����@���ض��ęC���ˣ�8.1 �����w�L�ȴ�s��ÿ�� 2 ����,���@ �������Ǻܿ�,�����ǣ�������@���͙C�����D(zhu��n)���� 7 ���~��Ҏ(gu��)ģ,�������ɞ���ʷ�ԁ���ˮ�º����������w֮һ,��
��Ȼ��HAMMR ����KĿ�˲����ٶ�,�����Ǿ���,��Cappelleri �f������һ�����܉������@Щ�C���˲������w�h(hu��n)���Ы@������Ƅ����ܣ�����������������m��(y��ng)��,���҂����Ը�׃�����Ď��Π��Դ��^Ѫ�ܻ���ֳ����С���տs�^(q��)��,���҂��о������Ŀ�˾����_�l(f��)�����ԑ�(y��ng)�õ��t(y��)�W(xu��)�ί��I(l��ng)����b�á����磺���ÙC�����b�dˎ��,�������������M�л�z��,���҂��ڴ������@Щ�C�����������w���S�ͬ�\����,���
liyuan.jpg (138.97 KB, ���d��(sh��): 74)
���d����
2023-4-13 21:28 �ς�
����ʿ�� Liyuan Tan �� David Cappelleri �������ôň���������Ӿ�C�����Ԅ�(chu��ng)�o䛵��ٶ����M,����Ƭ�����նɴ�W(xu��)Jared Pike
| 










 �ղ�
�ղ� �D(zhu��n)��
�D(zhu��n)�� ֧��
֧�� ����
����
 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351