��(l��i)Դ����(gu��)�H�������̌W(xu��)��(hu��)
�����ܲ��ϡ��ɾ��̡������c3D��ӡ���g(sh��)��Y(ji��)�ϣ����Ԍ�(sh��)�F(xi��n)�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)�c�����һ�w�����ſ��������w���й�Һ�D(zhu��n)���`��(q��)��(d��ng)Ч�ʸߡ���ȫ�Ըߵ����c(di��n)���ſ��������w�(q��)��(d��ng)��ܛ�w�C(j��)���˿��Ԍ�(sh��)�F(xi��n)һ�N��Ɔμ�(x��)������ķ����\(y��n)��(d��ng)�������3D��ӡ�̻��^(gu��)�������ôň�(ch��ng)�����̡��������w��(n��i)���w���ۼ��Y(ji��)��(g��u)���ΑB(t��i)����ʹ����ͽY(ji��)��(g��u)�ڳ�ȥ�ň�(ch��ng)�r(sh��)���w�ֻ֏�(f��)Һ�B(t��i)��ԓ��ӡ�������Ա��Q����׃����3D��ӡ���F(xi��n)��3D/4D��ӡ���g(sh��)�y�Ԍ�(sh��)�F(xi��n)�μ�(x��)��ܛ�w�Y(ji��)��(g��u)�ľ��ܼ�һ�w����������׃����3D��ӡ���g(sh��)��(chu��ng)���Ե؞�ԓ���}�Ľ�Q�ṩ�ˌ�(sh��)�F(xi��n);����

640.jpg (58.89 KB, ���d��(sh��): 282)
���d����
2023-12-21 11:06 �ς�
���գ�������ͨ��W(xu��)�������F(tu��n)�(du��)�����A��W(xu��)���ڇ�(gu��)�H�о���Ժ���x��F(tu��n)�(du��)�����ڡ�Applied Materials Today���l(f��)���}����׃����3D��ӡ��Փ�ģ��@�(xi��ng)�������һ�N�������ԭ���|(zh��)���z-���z�D(zhu��n)���C(j��)���Ĵſ���׃����3D��ӡ���������_չ�����о�?j��)?n��i)�ݡ����ȣ���(g��u)����һ�N��(qi��ng)�|׃���ԵĴſض�Ԫ�Ҹ��wϵ������(du��)���^���ԽM�b�Y(ji��)��(g��u)�M(j��n)�б�������Σ����÷�(w��n)�B(t��i)�̈́�(d��ng)�B(t��i)�ļ��Мy(c��)���ֶΣ��о��˴����|׃���w���������ԡ�����ճ�����Ժ��|׃�֏�(f��)���ԣ��_�����m�ϴ�ӡ���(y��u)��׃����(sh��)���ٴΣ���˴ň�(ch��ng)�c�\(y��n)��(d��ng)ϵ�y(t��ng)�f(xi��)�{(di��o)���Ƶ�3D��ӡƽ�_(t��i)����(du��)��ӡ��ˇ�M(j��n)�������о����M(j��n)һ����(y��u)������������ʽ�ň�(ch��ng)��(du��)��ӡ�γɵď�(f��)�ϽY(ji��)��(g��u)�M(j��n)�п��ƣ���(sh��)�F(xi��n)һ�N��׃���xʽ�\(y��n)��(d��ng)�����������׃�C(j��)���ˣ�Rheobot���ĸ���ſ���׃����3D��ӡ����׃�C(j��)���ˣ����Ԟ���g̽���������t(y��)ˎ��܊�ɲ���T���I(l��ng)���ṩ�µ�˼·��ȫ���о�˼·���£�
640 2.jpg (42.25 KB, ���d��(sh��): 283)
���d����
2023-12-21 11:06 �ς�
�D1 ȫ���о�˼· ��׃�О��ձ���������|(zh��)����, �Dz��όW(xu��)�����ۑB(t��i)�����I(l��ng)���P(gu��n)ע�Ļ����F(xi��n)�����Ҫ�n�}��3D/4D��ӡ��ˇҪ������ڇ�(y��n)�����ĕr(sh��)�g�Ϳ��g��(n��i)��(sh��)�F(xi��n)��׃����(x��)����(n��i)��ԭ���|(zh��)���z-���z��B(t��i)�ГQ��һ�N���͵Ŀ�����׃��Ҳ��һϵ���������(d��ng)������W(xu��)���A(ch��)�������|(zh��)���x�������D(zhu��n)�Q����Ϣ���f���\(y��n)��(d��ng)����ֳ�ȡ��|׃�Դ����˲�����׃���Եĕr(sh��)�g��ه�ԣ��Ǽ�(x��)����(sh��)�F(xi��n)׃���\(y��n)��(d��ng)�Ļ��A(ch��)��ԭ���|(zh��)�ı��|(zh��)�ρ�(l��i)�f(shu��)��һ�N�|׃�����w����׃����3D��ӡ��Ҫ��(du��)�Ҹ��wϵ��(n��i)���F(tu��n)���γɻ��Ɖĵ��ٶ��M(j��n)�о���(zh��n)�{(di��o)�أ�ʹ��a(ch��n)�����ԭ���|(zh��)�Ŀɿ����z-���z�D(zhu��n)����Ȼ���F(xi��n)�дſ��������w�ܵ����(n��i)������C(j��)�Ƶ����ƣ��o(w��)��ͬ�r(sh��)���F(xi��n)���@���Ĺ�Һ�D(zhu��n)�����|׃�ԣ����ܝM����׃����3D��ӡ�������w�������£�
����׃Һ��һ�N��(y��ng)�ÏV���Ĵſ��������w��������ň�(ch��ng)��������˲�g�a(ch��n)���ĵ�ճ��ţ�D���w������w�������w����׃���������(n��i)����(j��)�w��������ͨ����1��m���g�Ĵ�������h(yu��n)��(qi��ng)�ڟ���\(y��n)��(d��ng)�����(n��i)���ڴň�(ch��ng)���γ�朠�ؠ�Y(ji��)��(g��u)�����Եֿ��^��(qi��ng)�ļ������ã�ʹ����кܸߵ�������(y��ng)���������ڴ���׃Һȱ���|׃�ԣ�����̻��^(gu��)�����y�Ԝ�(zh��n)�_���Ʊ�����ò��ʹ��o(w��)������3D��ӡ��ʽ������͡�
����Һ�w���ɻ��dҺ�c��(w��n)���Ҹ������еļ{��(j��)���F���w��������3~15 nm���M�ɵķ�(w��n)���z�w��ԓſ����ܲ����^�Y(ji��)��(g��u)��ԥ�r(sh��)�g�^�L(zh��ng)�������^�ߵ��|׃�ԣ����������������w���Ĵ�ż�O���͟������С�ӽ����ڏ�(qi��ng)�ň�(ch��ng)����Ȼ����һ���Ŀ�����(d��ng)�ԣ�������(y��ng)��ͨ��С��10 Pa�������3D��ӡ�Пo(w��)����(sh��)�F(xi��n)��֧�Ρ�
����׃�z���w�����z��߾����ɢ������(j��)�����w�������ڻ��w�ļs�����ã������w���ڴň�(ch��ng)����ɾۼ�����r(sh��)�g�^�L(zh��ng)����˿���ͨ�^(gu��)3D��ӡ��ʽ���ͣ�������ԓ�wϵ����ň�(ch��ng)�¾����^�ߵă�(ch��)��ģ������1000 Pa����ʹ���ӡ���ͺ�ʼ�K̎��̑B(t��i)���o(w��)����ɏ����z�����z��B(t��i)���D(zhu��n)����
���������ɷN�����ڴň�(ch��ng)ͻȻʩ�ӻ�ȥ�l���µă�(ch��)��ģ��׃����r�M(j��n)�б��^����D2��ʾ�����y(t��ng)�������w���^�M���c�{(di��o)�ؙC(j��)�����ƣ�����׃���ԟo(w��)���M����׃����3D��ӡ��Ҫ����ˣ�ؽ����(g��u)��һ�Nͬ�r(sh��)�߂��^��(qi��ng)�|׃���c���z-���z�D(zhu��n)�����Ե����ʹſ����ܲ��ϡ�
640-1.jpg (71 KB, ���d��(sh��): 299)
���d����
2023-12-21 11:06 �ς�
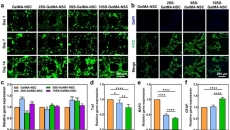
�D2 �ſ��������w����׃���Ա��^����a�����y(t��ng)�ſ��������w�ڴň�(ch��ng)�º��^��B(t��i)����b�����y(t��ng)�c���ʹſ��������w��(ch��)��ģ����(du��)�ň�(ch��ng)푑�(y��ng)��r ᘌ�(du��)�F(xi��n)�в��ϵIJ��㣬�о��F(tu��n)�(du��)�l(f��)����һ�N�ɴ�ӡ�����ʹſ����ܲ��ϣ����ſ������|׃���w��MTF����MTF���ھ����@���ļ���׃ϡ�c�|׃���ԣ����ܵ��ň�(ch��ng)����Ч�{(di��o)�أ�ʹ��ɞ�һ�N���ԑ�(y��ng)����3D��ӡ�����ܲ��ϣ����S���µđ�(y��ng)���ṩ�˄�(chu��ng)���ԵĽ�Q��������������MTF�͏��Բ���һ����������ԵĿɴ����O(sh��)�䣬��MTF�������(q��)��(d��ng)ܛ�w�C(j��)���ˣ�����MTF��������Ϗ�(f��)�ϴ�ӡ������������Ե��ЙC(j��)�Y(ji��)��(g��u)���ſ��|׃���ϵ��Ƃ䷽�������P(gu��n)������(sh��)��(j��)��D3��ʾ��
640-2.jpg (127.75 KB, ���d��(sh��): 315)
���d����
2023-12-21 11:06 �ς�
�D3 MTF���Ƃ�ͱ�������a��.MTF���Ƃ��^(gu��)��ʾ��D��b��. Fe3O4 MNPs��TEM��Ƭ��c��OMBT�Ӱ��SEM�D��d��MNPs�ĴŻ�������e��. OMBT/MNP�s���Y(ji��)��(g��u)��SEM�D��f�� MTF�Ј�(ch��ng)�ň�(ch��ng)�T��(d��o)�Y(ji��)��(g��u)�Ĺ�W(xu��)�@�D��
�����ܲ��ϡ��ɾ��̡������c3D��ӡ���g(sh��)��Y(ji��)�ϣ����Ԍ�(sh��)�F(xi��n)���ܽY(ji��)��(g��u)��һ�w���O(sh��)Ӌ(j��)�c���죬ԓ���g(sh��)���Q��4D��ӡ���g(sh��)��ԓ���g(sh��)��(ji��n)���ˏ��O(sh��)Ӌ(j��)�����(sh��)��Ą�(chu��ng)���^(gu��)�̡������ֹ��4D��ӡ�����(sh��)���þۺ�������ܲ���������A(ch��)���ϣ�ͨ�^(gu��)�̼�푑�(y��ng)�µď��Ի�����׃�Ό�(sh��)�F(xi��n)���ܣ��҇�(gu��)��ף��̖(h��o)������܇�����Ї�(gu��)��(gu��)�죬�����������аl(f��)���Π�ӛ���ۺ�����ό�(sh��)�F(xi��n)ԭλչ�_��
2018������(gu��)��ʡ������W(xu��)�w�x�R�n�}�M��Nature��(b��o)����ȫ���ׂ�(g��)�ſ�4D��ӡ�о����������P(gu��n)���g(sh��)�����������в�ͬ�Ů��ֲ���ܛ�w���ܽY(ji��)��(g��u)�����������t(y��)���I(l��ng)��ďV韑�(y��ng)��ǰ��ʹԓ���g(sh��)Ѹ�ٳɞ�W(xu��)�g(sh��)���о���ǰ��?z��)��c(di��n)�����g(sh��)�Č�(sh��)�F(xi��n)�����ڴ�ӡ�^(gu��)���и�׃�ۺ�����������ܲ�����Ӳ���w���ĴŮ�����ʹ��ӡ�Y(ji��)��(g��u)�о�������ĴŮ�����ֲ��������ڹ��w���w�����ƣ��y�Ԍ�(du��)���ͺ�Y(ji��)��(g��u)�еĴŮ��ֲ��M(j��n)���؏�(f��)�����̡���ʹ�F(xi��n)�дſ�4D��ӡܛ�w���ܽY(ji��)��(g��u)�ڴň�(ch��ng)�µ�푑�(y��ng)�������ۯB��Ť�D(zhu��n)�������Ⱥ�(ji��n)��׃����ʽ��
�����3D��ӡ�̻��^(gu��)�������ôň�(ch��ng)�����̡��������w��(n��i)���w���ۼ��Y(ji��)��(g��u)���ΑB(t��i)����ʹ����ͽY(ji��)��(g��u)�ڳ�ȥ�ň�(ch��ng)�r(sh��)���w�ֻ֏�(f��)Һ�B(t��i)��ԓ��ӡ�������Ա��Q����׃����3D��ӡ������Ԍ�ԓ��ӡ����ҕ��һ�N�����4D��ӡ���c��Ҏ(gu��)�ۺ�������ܲ��ϴſ�4D��ӡ���ӵ�׃�ξS�Ȳ�ͬ���������о�����׃����3D��ӡ�����˲��ϵĿ������z-���z�D(zhu��n)�������ӵľS���ǽY(ji��)��(g��u)��(n��i)������׃���ԣ����ɷN���g(sh��)��Y(ji��)�ϣ������M(j��n)һ����(chu��ng)����߂��Π��׃���ԏ�(f��)���{(di��o)��������4D��ӡģʽ��Ҋ�D4����
640-3.jpg (28.06 KB, ���d��(sh��): 278)
���d����
2023-12-21 11:06 �ς�
�D4 �ſ���׃����3D��ӡ����D ���y(t��ng)ܛ�w�C(j��)���˵�ԭ�������ò��Ϗ���׃��ģ�Mܛ�w��(d��ng)���О飬������(du��)���Ǿ߂����w�߶ȷֻ���ܛ�w��(d��ng)������~��ˮĸ�ȡ�Һ�w�C(j��)��������ȱ�ٷ���ԭ�ͺ�Һ�D(zhu��n)���C(j��)����ʹ���y�Ԍ�(du��)������B(t��i)�M(j��n)�и�֪����Ч�{(di��o)�أ��о�?j��)H���ڌ�(sh��)�(y��n)�ң��o(w��)����չ����(sh��)�H��(y��ng)�á��������F(tu��n)�(du��)����(j��)3D��ӡ��μ�(x��)���Y(ji��)��(g��u)�����һ�N��׃�C(j��)���ˣ�Rheobot�����¸���������(du��)���džμ�(x��)��������簢�װ��x��
���װ��x���\(y��n)��(d��ng)�����会(x��)��Ĥ��(n��i)ԭ���|(zh��)�����z-���z�D(zhu��n)����ԭ���|(zh��)����(j��)��ֲ�λ�ÿɷ֞����|(zh��)�c��(n��i)�|(zh��)�����z�����|(zh��)��Ҫ�ֲ��ڰ��װ��x���w�ⲿ�����z���(n��i)�|(zh��)�ֲ��ڰ��װ��x��(n��i)�������z��ԭ���|(zh��)�����|(zh��)�����Ĺܠ���g����ǰ����(d��ng)�����|(zh��)�ܳ䮔(d��ng)������Ƥ�w����(d��ng)��(n��i)�|(zh��)���_(d��)ǰ�˕r(sh��)����(hu��)ͨ�^(gu��)�|׃�ϻ���aging��) �C(j��)���D(zhu��n)�Q�����z�����|(zh��)���Ķ������څ^(q��)���γɂ���ǰ�ˡ�����ǰ�˽������|(zh��)�ܵ����죬ʹ�C(j��)�w��ǰ�\(y��n)��(d��ng)���S�����װ���ǰ�\(y��n)��(d��ng)�������|(zh��)ͨ�^(gu��)�|׃������rejuenation���C(j��)���ں��׃��Һ�B(t��i)��(n��i)�|(zh��)�������؏�(f��)�����^(gu��)�̡��@�N���|(zh��)�̓�(n��i)�|(zh��)�D(zhu��n)�Q�^(gu��)�̵ă�Ч��(y��ng)ʹ���װ��x��ǰ�\(y��n)��(d��ng)��
��������ķ°��װ��x��׃�C(j��)���˲��ù��z�����cMTF��(f��)�ϴ�ӡ��ˇ�M(j��n)��һ�w��������һ���棬�̻���MTF�ڏ�(f��)�ϴ�ӡ�^(gu��)���п��Ԟ鏗�Ա�Ĥ�Y(ji��)��(g��u)��ӡ�ṩ��Ч֧�Σ���һ���棬���ͺ��MTF��������ܛ�w�Y(ji��)��(g��u)���(q��)��(d��ng)���|(zh��)��ͨ�^(gu��)�ň�(ch��ng)�{(di��o)���������w������(d��ng)�����c���z-���z�D(zhu��n)�Q�����Ԍ�(sh��)�F(xi��n)һ�N���׃���x�\(y��n)��(d��ng)������ܛ�w�(q��)��(d��ng)ģʽ,��D5 ��ʾ:
640-4.jpg (120.23 KB, ���d��(sh��): 298)
���d����
2023-12-21 11:06 �ς�
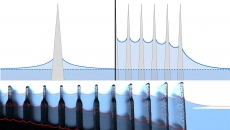
�D 5 ��׃�C(j��)���˵Ĵ�ӡ���(q��)��(d��ng)����a��. �˚��Y(ji��)��(g��u)�Ķ���ϴ�ӡ�^(gu��)�̣�b��. �ň�(ch��ng)��ȥ���׃��Ч����c����׃�C(j��)�����ز�ͬ������B�m(x��)�Π�׃�Ρ�
�C���������ſ��������w�Ƿ�ɢ���|(zh��)��Һ�w��һ������ܲ��ϣ�ͨ�^(gu��)�ň�(ch��ng)�(q��)��(d��ng)��Ҹ��w���γ���ȫ������ԽM�b����Y(ji��)��(g��u)����ʹ�ſ��������w��(sh��)�F(xi��n)��ȫ����Ĵſع�Һ��׃������(gu��)���պ���֣�NASA�����ڌ����������һ�N���ôſ��������w�(q��)��(d��ng)��ܛ�w���ܽY(ji��)��(g��u)��ԓ�Y(ji��)��(g��u)���ſ��������w�ܷ��ھۺ��ﱡĤ��(n��i)��ʹ���ڃ�(n��i)���Ǿ���ň�(ch��ng)�ֲ��®a(ch��n)����Ɔμ�(x��)������׃�ε��\(y��n)��(d��ng)������(j��)ԓԭ���O(sh��)Ӌ(j��)��ܛ�w�C(j��)���˿����m��(y��ng)��(f��)�s�������ǭh(hu��n)�����������������׃����3D��ӡ��������һ���������w�(q��)��(d��ng)ܛ�w�C(j��)���ˣ���׃�C(j��)���ˣ����P(gu��n)�I��ԓ���g(sh��)������Q�o(w��)��(chu��ng)�ί�����������̽����ȫ����܊�ɲ�ȑ�(y��ng)���y�}��
| 









 �ղ�
�ղ� �D(zhu��n)��
�D(zhu��n)�� ֧��
֧�� ����(du��)
����(du��)
 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351