|
2024年1月15日,,南極熊獲悉,,來自西湖大學(xué)的研究人員提出了一種多材料嵌入式打印方法(ME3P),用于制造軟機(jī)器人中使用的復(fù)合材料增強(qiáng)執(zhí)行器(CRA),。與其他3D打印方法相比,,新方法大大提高了制造靈活性,允許可編程響應(yīng),,并且可用于復(fù)雜的軟機(jī)器人,。
相關(guān)研究以題為“Multimaterial Embedded 3D Printingof Composite Reinforced Soft Actuators”的論文被發(fā)表在《Research》期刊上。

屏幕截圖 2024-01-15 171016.png (223.18 KB, 下載次數(shù): 67)
下載附件
2024-1-15 18:51 上傳
不同于傳統(tǒng)的剛性機(jī)器人,,軟體機(jī)器人因其優(yōu)異的機(jī)械順應(yīng)性,,在精密物體操縱、安全人機(jī)交互以及用于診斷和手術(shù)的醫(yī)療機(jī)器人等領(lǐng)域的應(yīng)用引起了極大的關(guān)注,成為了國(guó)際機(jī)器人界的熱點(diǎn)研究方向,。在不同類型的軟執(zhí)行器中,,軟氣動(dòng)執(zhí)行器(SPA)在高工作負(fù)載、優(yōu)異的可逆性和可控性以及較快的驅(qū)動(dòng)速度方面具有強(qiáng)大的優(yōu)勢(shì),。其中,,軟復(fù)合材料增強(qiáng)執(zhí)行器(CRA)因其結(jié)構(gòu)簡(jiǎn)單、可控性高而得到廣泛應(yīng)用,。然而,,多步成型這種耗時(shí)的方法仍然是主要的制造方法。
在這項(xiàng)工作中,,研究人員首次提出了一種用于 CRA 的新型多材料嵌入式 3D 打印 (ME3P) 方法,,該方法能夠整體設(shè)計(jì)和制造具有內(nèi)部通道的任意形狀的復(fù)雜執(zhí)行器主體,以及復(fù)雜增強(qiáng)材料的輕松圖案化致動(dòng)器表面上的材料,。
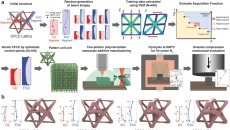
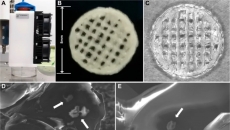
用于打印執(zhí)行器主體的系統(tǒng)的結(jié)構(gòu)如圖1A所示,。研究人員通過 2 步過程打印了氣動(dòng)花朵狀樣品:首先,使用軟墨水打印花朵基質(zhì)中帶有空氣通道的花瓣(圖S1),;其次,,將硬墨水共形地印刷在花瓣的兩側(cè),以控制膨脹時(shí)形狀的變形,。添加旋轉(zhuǎn)軸(U 軸)以在花瓣表面打印堅(jiān)硬的加固圖案,。步驟2中的噴嘴尖端彎曲至90°,以確保其在打印位置垂直于花瓣表面(圖1A和B),。為了成功的嵌入打印,,油墨的儲(chǔ)能模量應(yīng)比基體材料的儲(chǔ)能模量高1或2個(gè)數(shù)量級(jí)(圖1C)。在本研究中,,選擇卡波姆凝膠作為基質(zhì)材料,,其流變特性已在我們之前的工作中進(jìn)行了研究。固化花的綻放與設(shè)計(jì)目標(biāo)一致,,表明打印的硬圖案具有良好的增強(qiáng)性能(圖1D和電影S2),。接下來,展示了一種全向彎曲執(zhí)行器,,其特點(diǎn)是具有 3 個(gè)獨(dú)立內(nèi)部通道的軟圓柱形充氣體(圖1F,左),。隨后,,以相對(duì)于圓柱體的軸向方向±20°的交叉角打印硬質(zhì)增強(qiáng)編織物,以限制其徑向膨脹,。3個(gè)通道的壓力由3個(gè)獨(dú)立的氣源控制,。圖1F展示了其全向彎曲運(yùn)動(dòng)的能力。
research.0122.fig.001.jpg (284.16 KB, 下載次數(shù): 82)
下載附件
2024-1-15 18:51 上傳
圖1 用于軟復(fù)合執(zhí)行器和機(jī)器人的多材料嵌入式打印概述
2.jpg (190.26 KB, 下載次數(shù): 69)
下載附件
2024-1-15 18:51 上傳
圖2 .硬油墨和軟油墨的流變學(xué)和機(jī)械性能
3.jpg (219.12 KB, 下載次數(shù): 112)
下載附件
2024-1-15 18:51 上傳
圖3 .嵌入式 3D 打印流程的優(yōu)化
4.jpg (282.4 KB, 下載次數(shù): 81)
下載附件
2024-1-15 18:51 上傳
圖4 .執(zhí)行器和形狀變形結(jié)構(gòu)的可編程響應(yīng)
5.jpg (286.5 KB, 下載次數(shù): 72)
下載附件
2024-1-15 18:51 上傳
圖5 用于點(diǎn)位置任務(wù)的串聯(lián)執(zhí)行器的逆向設(shè)計(jì)
6.jpg (269.46 KB, 下載次數(shù): 80)
下載附件
2024-1-15 18:51 上傳
圖6 .打印的軟管爬行機(jī)器人。
在這項(xiàng)工作中,,研究人員開發(fā)了一種 ME3P 方法,,用于 CRA 和基于 CRA 的軟機(jī)器人的簡(jiǎn)便和可編程制造。兩種具有可調(diào)彈性模量的不同油墨被設(shè)計(jì)用作 CRA 的軟膨脹體和硬增強(qiáng)圖案,。研究油墨的流變特性和工藝參數(shù),,以優(yōu)化打印質(zhì)量和分辨率。通過設(shè)計(jì)和制造增強(qiáng)復(fù)合材料的圖案以及軟體的不同幾何形狀,,研究人員演示了具有可編程響應(yīng)(伸長(zhǎng),、收縮、扭轉(zhuǎn),、彎曲以及螺旋和全向彎曲)的執(zhí)行器,,并使用軟管爬行機(jī)器人作為模型系統(tǒng)來展示他們?yōu)閷?shí)際應(yīng)用制造復(fù)雜軟機(jī)器人的能力。同時(shí),,提出了一種有限元分析數(shù)據(jù)驅(qū)動(dòng)方法來設(shè)計(jì)更復(fù)雜的執(zhí)行器,。這項(xiàng)工作為未來軟機(jī)器人的生產(chǎn)提供了一個(gè)多功能且有前途的平臺(tái),展示了 ME3P 在未來制造基于 CRA 的軟機(jī)器人方面的多功能性,。
| 






 收藏
收藏 轉(zhuǎn)播
轉(zhuǎn)播 支持
支持 反對(duì)
反對(duì)
 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351