��������� ������ �� 2025-3-12 11:53 ��
2025��3��12��,���ϘO�ܫ@Ϥ,����ʿ��(gu��)�Ҳ��ϿƌW(xu��)�c���g(sh��)��(sh��)�(y��n)��Empa���о��ˆT�������������a(ch��n)�܉��c�挍(sh��)�������������켡��,���������Qͨ�^(gu��)3D��ӡ���g(sh��)���������һ�N����ܛ�־��Џ��Եď�(qi��ng)��Y(ji��)��(g��u)���@Щ���켡���������t(y��)�W(xu��),���C(j��)���˼��g(sh��)�Լ��κ���Ҫ����(zh��n)�����\(y��n)��(d��ng)�đ�(y��ng)���I(l��ng)���аl(f��)�]��Ҫ����,��

�ňDƬ��_20250312114301.jpg (63.54 KB, ���d�Δ�(sh��): 8)
���d����
2025-3-12 11:47 �ς�
��Empa��3D��ӡܛ�w��(d��ng)��
ģ���挍(sh��)�����y�}
���켡��ĝ����h(yu��n)��ֹ���(q��)��(d��ng)�C(j��)�����\(y��n)��(d��ng),��δ��(l��i)�������������˂����������ߕr(sh��)�ṩ֧��,��������������ܓp�ļ���M�����M�����,���_(k��i)�l(f��)�����c��Ȼ���������������켡�⣬��Ȼ��һ�(xi��ng)���g(sh��)�ϵ��ش�����(zh��n),��
Ҫ�c���A����ƥ��,�����켡����ͬ�r(sh��)�߂����������Ժ���ܛ��,������,����(zh��)���������켡����P(gu��n)�I�M�ɲ��֣�ؓ(f��)؟(z��)����}�_�D(zhu��n)�Q��C(j��)е�\(y��n)��(d��ng),����(zh��)�����ڶ�N�h(hu��n)���аl(f��)�]������,���ļ�ͥ�Ԅ�(d��ng)������܇���棬�ٵ����M(j��n)�Ĺ��I(y��)�O(sh��)ʩ,��ֻ�躆(ji��n)�εİ��o�������Ɍ�(sh��)�F(xi��n)���w���Ƅ�(d��ng),��Ȼ����Ŀǰ�Ĉ�(zh��)���������(ji��n)Ӳ�ęC(j��)е����,���c���w�����������ȥ���h(yu��n),��
�ňDƬ��_20250312111948.jpg (96.09 KB, ���d�Δ�(sh��): 8)
���d����
2025-3-12 11:47 �ς�
�{(di��o)���
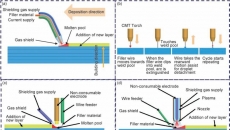
�о��ˆT������3D��ӡ���g(sh��)��(l��i)���a(ch��n)��ܛ�����Ƴɵď�(f��)�s��(zh��)�����M��,���@�N��늏��Ԉ�(zh��)������DEA���ɃɷN��ͬ��͵Ĺ�����Ϙ�(g��u)�ɣ�һ�N�nj�(d��o)늵�늘O���ϣ���һ�N�Dz���(d��o)늵�늽��|(zh��),���@�ɷN���όӌӶѯB,������Empa�о��TPatrick Danner�������ģ������ĽM������ڽ��e(cu��)����ָ,����(d��ng)��늘O��ʩ��늉��r(sh��),����(zh��)������(hu��)�տs��ģ�M������\(y��n)��(d��ng),������(d��ng)늉��Ƴ��r(sh��),����(zh��)�����t�֏�(f��)����ʼ��B(t��i)��
�ňDƬ��_20250312113645.jpg (228.94 KB, ���d�Δ�(sh��): 8)
���d����
2025-3-12 11:47 �ς�
����늏����w��(d��ng)����DEA���w�S���������ԭ��
Danner����,��3D��ӡ�@�N�Y(ji��)��(g��u)�O������(zh��n)�ԡ��M�܃ɷNܛ������늚�����������@�,�����ڴ�ӡ�^(gu��)����,���������О��횷dz�����,��������Ҫ���ַ��x��B(t��i)��������K�Ĉ�(zh��)�������ֱ�횾o�ܽY(ji��)��,��
��ӡ���ġ����⡱��������ܛ,���Ա���늴̼������������׃������,������3D��ӡ���ϱ�횝M���ض�Ҫ������?c��)ڴ�ӡ�����±���܉�Һ��,���Ա�ć���D�����Լ�,���D���������ֱ�횾߂�����ճ���Ա����Π�,��
Dannerָ�������@Щ���������ì�ܡ���(y��u)������һ��(g��)����,��������(hu��)��(d��o)���������ԵĐ���,������׃�ø����,���
�ňDƬ��_20250312114536.jpg (377.26 KB, ���d�Δ�(sh��): 9)
���d����
2025-3-12 11:47 �ς�
��ͨ�^(gu��)��ˇ׃���{(di��o)�����w�Y(ji��)��(g��u)
��VR��������(d��ng)�����K
�о�С�Mؓ(f��)؟(z��)��Dorina Opris,���Լ���(l��i)���K����(li��n)�������W(xu��)Ժ���о��ˆT�������ɹ��f(xi��)�{(di��o)�˶�N�ì�ܵ�����,������ʹ�������K����(li��n)�������W(xu��)Ժ�о��ˆTTazio Pleij��Jan Vermant�_(k��i)�l(f��)��������ī,����ͨ�^(gu��)�ض��ć��켼�g(sh��)���ɹ���ӡ���˹�����ܛ��(zh��)����,��
�@�κ�����Manufhaptics�(xi��ng)Ŀ��һ����,��ԓ�(xi��ng)Ŀ��ETH�I(l��ng)���(zh��n)���I(l��ng)�����M(j��n)�����һ��(g��)�����(xi��ng)Ŀ���(xi��ng)Ŀ��Ŀ��(bi��o)���_(k��i)�l(f��)һ�N����,��ʹ��̓�M�F(xi��n)��(sh��)�е��w�(y��n)?z��i)܉���ӽ���?sh��)����,�����@��(g��)�(xi��ng)Ŀ�У����켡���������ͨ�^(gu��)�ṩ������(l��i)ģ�Mץ�����w�ĸ��X(ju��),��
�ňDƬ��_20250312114550.jpg (75.89 KB, ���d�Δ�(sh��): 10)
���d����
2025-3-12 11:47 �ς�
��Empa��Patrick Danner�����о���ܛ�����ƳɵĈ�(zh��)����
ܛ��(zh��)�����đ�(y��ng)�Ý����h(yu��n)�h(yu��n)�������@һ�ض��(xi��ng)Ŀ,�����������p�㡢�o��,�������܉����(j��)��Ҫ�M(j��n)�ж����Π�,��ܛ��(zh��)�����Н���������y(t��ng)��܇���C(j��)е�͙C(j��)�����еĈ�(zh��)����,�����t(y��)���I(l��ng)��,������ͬ���о�đ�(y��ng)��ǰ����ǰ���������܉�õ��M(j��n)һ���İl(f��)չ,��
�F(xi��n)�A��,��Opris��Danner�ѽ�(j��ng)�_(k��i)ʼ̽���@һ�I(l��ng)���������¹�ˇ���H�܉��ӡ����(f��)�s�Π���w�S,��߀�����a(ch��n)�����Џ��Ե��L(zh��ng)�w�S,��Oprisָ����������҂���ʹ�@Щ�w�S׃�ø���(x��),�������Ĺ�����ʽ�����ӽ��挍(sh��)�����w�S�,����о��ˆT��?c��)O(sh��)��,��δ��(l��i)���S���������@Щ�w�S��(l��i)��ӡ�����w���K��Ȼ��,�����@һԸ����(sh��)�F(xi��n)֮ǰ,�������S���о����_(k��i)�l(f��)������Ҫ��ɡ�
|










 �ղ�
�ղ� �D(zhu��n)��
�D(zhu��n)�� ֧��
֧�� ����(du��)
����(du��)
 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351