��������� Сܛ�� �� 2017-4-20 12:44 ��
���ܲ��ϽY(ji��)��(g��u)�ַQ�C���Y(ji��)��(g��u),�������h(hu��n)���̼��£���늴ň����ضȈ�����ȡ���,��pHֵ�ȣ����ܲ��ϽY(ji��)��(g��u)�Ɍ�����,�����ƺ��(q��)�����N���ܼ���һ��,���܉��������(y��ng)�ķ���(y��ng)�����ܲ��ϽY(ji��)��(g��u)����ģ�������w������ֵ��,�����ޏ�(f��)��,�����\���ԡ��ԌW(xu��)��(x��)�ͺͭh(hu��n)���m��(y��ng)��,�� ���ܲ��Ϸ��ʽ����,������(j��)���ܼ��M�ɳɷֵIJ�ͬ���ɴ��w�֞飺늻��Ծۺ���,���Π�ӛ������,����늲��ϣ�늴���׃�w,��������s���ϵ�,�����ܲ��ϽY(ji��)��(g��u)�ڱ����I(l��ng)��������Ҫ��(y��ng)�ã��纽�պ����w����,�����ܙC����,�������t(y��)����е����������,���Y(ji��)��(g��u)�����O(ji��n)�y,���p������I(l��ng)��Ȼ ��,���������ܲ������칤ˇ�ď�(f��)�s�ԣ����y(t��ng)���ܲ������췽��ֻ�����캆���Π�����ܲ���,���y�������(f��)�s�Π�����ܲ��ϽY(ji��)��(g��u),�����ܲ��ϵĂ��y(t��ng)�Ƃ䷽����(y��n)�����������ܲ��ϽY(ji��)��(g��u)�İl(f��)չ�c��(y��ng)�á�

timg.jpg (39.38 KB, ���d��(sh��): 150)
���d����
2017-4-20 11:34 �ς�
�������켼�g(sh��)�ַQ���ٳ��ͼ��g(sh��)��3D��ӡ���g(sh��),��������ԭ���Dz������c�۷e�γ���,�������۷e�ɞ��w���������켼�g(sh��)��������������(f��)�s�Π����S���w,������l(f��)չ�����ܲ���3D��ӡ���g(sh��)ʹ���������(f��)�s�Π�����ܲ��ϽY(ji��)��(g��u)�ɞ����,�����������4D��ӡ���g(sh��)�nj�3D��ӡ���g(sh��)�c���ܲ��ϽY(ji��)��(g��u)�Y(ji��)�����������ܲ��ϽY(ji��)��(g��u)��3D��ӡ���A(ch��)�������h(hu��n)���������S���r�g���F(xi��n)�����ĽY(ji��)��(g��u)׃��,�����Č����ȸ������ܲ��ϵ��������켼�g(sh��)�ڇ���(n��i)��l(f��)չ?f��n)�r����(y��ng)�ú�4D��ӡ���g(sh��)���о��Mչ,��Ȼ�����c��B���n�}�M�P(gu��n)��3D��ӡ���ܲ��ϽY(ji��)��(g��u)��4D��ӡ���g(sh��)����Ҫ�ɹ���
1.3D��ӡ���ܲ��χ���(n��i)���о��Mչ
1.13D��ӡ늻��Ծۺ������
늻��Ծۺ�����ϣ�ElectroactivePolymer,�� EAP����һ���늈������¿��Ԯa(ch��n)������ȳߴ� ���Π�׃�����������Թ��ܲ���,�������ܲ��ϵ�һ����Ҫ��֧���x�Ӿۺ���-���ُ�(f��)�ϲ���(Ion⁃ icpolymer-metalcomposites,��IPMC),��BuckyGel�ͽ�늏��Բ���(Dielectricelastomers��DE)�քe�� EAP�ĵ��ʹ���,���������S��(f��)�s�Π�늻��Ծۺ���Y(ji��)��(g��u)��ԓ�I(l��ng)�����Ҫ�о��n�},��
120539wqqr04rrfzo47114.gif (1.85 MB, ���d��(sh��): 192)
���d����
2017-4-15 14:17 �ς�
1.1.13D��ӡIPMC IPMC���������x�ӽ��QĤ���w�ɱ����Ƃ��
늘O���γɵď�(f��)�ϲ��ϣ������늉�������,�����σ�(n��i)�����x�Ӻ�ˮ������늘Oһ��(c��)�ۼ�,����(d��o)���|(zh��) ����늺ɷֲ��IJ�ƽ�⣬�Ķ����^�Ϯa(ch��n)������׃�� ,���ɂ��y(t��ng)�����Ƃ����IPMC���Ͻ^�����(sh��)��Ƭ��,���܂��y(t��ng)�Ƃ䷽�������ƣ����y�Ƃ����(f��)�s�Π��IPMC���ܲ���,�� EvanMalone��HodLipson��2006���״���� �˽���3D��ӡ���g(sh��),���������ӽY(ji��)��(g��u)����ӽY(ji��)��(g��u) IPMC���ܲ��ϡ�ԓ�о��M��Nafion��Һ�c�ƾ� ��ˮ�Ļ����Һ�����ӡIPMC���w��ǰ�w����,����AgС�w���cNafion��Һ���Һ�w����IPMC늘O����,����ͨ�^3D��ӡ���z�����Ƃ��һ�������w���z������Ȼ��ͨ�^���^���c�ۼӹ̻�늘O-Nafion���w-늘O���ӽY(ji��)��(g��u),��
3D��ӡ�Ƃ�Ĺ� �z�����������3D��ӡIPMC��֧��,����ֹ���^������Һ�w�ڹ̻�֮ǰ���Ӷ�Ӱ�IPMC���Ƃ䡣���˜p����Һ�ē]�l(f��)�����LIPMC���ܲ��ϵ�ʹ�É���,��Malone�n�}�M��3D��ӡ3�ӽY(ji��)��(g��u)IPMC���A(ch��)���M�и��M,���ڹ̻��γɵ�늘O���(c��)��ӡ�̻�һ����HydrinCthermoplastic(ZeonChemicalsL.P.)�����γɵIJ��ɱ�ˮ�B�ĵ͌�(d��o)���늘O���o�ӡ�3D��ӡ�������ӽY(ji��)��(g��u)IPMC���Ԍ���Һ�����IPMC֮��,����Ч���L��ʹ�É���,��
�D1��Y(ji��) ��(g��u)ʾ��D��3D��ӡ�Ƃ��IPMC,�� �M�ܲ���3D��ӡ���g(sh��)�Ƃ����Ƭ��I(l��ng)PMC�c���y(t��ng)��ˇ�Ƃ����Ƭ��I(l��ng)PMC�������Ͼ����^���࣬�����@�N�µ�IPMC���ܲ���3D��ӡ���g(sh��)�������(f��)�s�Π�I(l��ng)PMC���S�Y(ji��)��(g��u)�춨�˻��A(ch��),��ʹ���ֱ�������������������Π�I(l��ng)PMC���ܽY(ji��)��(g��u)�ɞ����,��
QQ�؈D20170415132320.jpg (24.71 KB, ���d�Δ�(sh��): 160)
���d����
2017-4-15 13:25 �ς�
1.1.23D��ӡBuckyGelActuator/Sensor
BuckyGel�������о��l(f��)չ��һ�N�x����늻� �Ծۺ������ܲ��ϣ�BuckyGel�ĽM�ɺ��(q��)�ӂ���ԭ�������IPMC,��BuckyGel�����ӽY(ji��)��(g��u)�M��,�����g���w���Ϟ��ɾۺ�����x��Һ�w��(g��u)�ɵ�늽��|(zh��)�ӣ����w���σ�߅����̼�{��,���ۺ�����x��Һ�w��(g��u)�ɵ�늘O����,���ڃɂ�(c��)늘O���d늉��r���x��Һ�w�е����x����ɂ�늘O�Ƅ�,������B(y��ng)uckyGel�ď���,�� ���y(t��ng)BuckyGel���Ƃ䷽����������Һ�TĤ�� (SolutionCastingMethod)���ӷքe�̻�늘O�ͻ� �w��,���Ƃ����BuckyGel�����Ƭ��,���y���Ƃ��(f��)�s�Π��BuckyGel��
N.Kamamichi��2008�������3D��ӡ���g(sh��)����BuckyGel,������3D��ӡ���g(sh��)���c�ۼӹ̻�늘O-���w����-늘O,�������Ƃ������(f��)�s�Π��BuckyGel��ԓ�n�}�M����3D��ӡ���g(sh��)�������Π��BuckyGel���D2��,������3D��ӡ���g(sh��)���Կ˷����y(t��ng)�Ƃ䷽����ȱ��,�����������Π�BuckyGel���ܲ��ϽY(ji��)��(g��u)��
QQ�؈D20170415132347.jpg (24.07 KB, ���d�Δ�(sh��): 149)
���d����
2017-4-15 13:25 �ς�
1.1.33D��ӡDE
���y(t��ng)DE���������ڽ�늏���Ĥ��������� ����Ϳ������늘O��(g��u)�������νY(ji��)��(g��u),����(d��ng)ʩ����늉�U,��DE���ϵ����±������ژO���e������ؓ(f��)늺ɡ�Q����ؓ(f��)늺�������a(ch��n)���o늎����,���Ķ��ں�ȷ����ω��s���϶�ʹ����׃С,��ƽ����e�U�������y(t��ng)�Ƃ䷽���Ƃ����DE���ϴ���鱡Ĥ��,���y���Ƃ������(f��)�s�Ԡ��DE���ϽY(ji��)��(g��u),��
Rossiter����2009���״����3D��ӡDE�� �ϣ�ԓ�n�}�M����̻��۱�ϩ���������DE���ϵļ��wĤ����,�����������̻���Stereolithog⁃raphy��3D��ӡ���g(sh��),�������p���^�����̻�3D��ӡ�C��һ�����^���Ӵ�ӡ�̻�֧�νY(ji��)��(g��u),����һ�����^���c�ۼӇ���Һ�w�۱�ϩ�����,��ͨ�^���������̻����ͣ����ӹ̻��γ����S�۱�ϩ����w����(�D3),��֮��֧��ȥ��,���������̻����͵ľ۱�ϩ����w���ϱ���ͿĨ����늘O����,���γ�DE���ϡ�
QQ�؈D20170415132356.jpg (30.05 KB, ���d�Δ�(sh��): 143)
���d����
2017-4-15 13:25 �ς�
Landgraf����2013�������Aerosoljetprint⁃ ing(���F��ӡ)3D��ӡ���g(sh��)����DE����,�����w�� �ϲ��ù��z���ϣ�늘O���ϲ��ù��z�c̼�{�ܻ����,��ͨ�^���ӹ̻�늘O-���w-늘O�ķ�ʽ���F(xi��n)�����νY(ji��)��(g��u)DE���ϵ�3D��ӡ,��ԓ�n�}�M���ó������ߚ≺�����zҺ�w�D(zhu��n)׃?y��u)释�F�֮��ͨ�^���^�����z���F���䵽����ƽ�_���挍�F(xi��n)���z�Ĵ��,����D4��,�������x�õĹ��z���p�M�ݻ�� �̻������˷�ֹ�p�M�ݹ��z�ڇ��^��(n��i)�̻��������^,��ԓ�n�}�M�O(sh��)Ӌ���p���^��ӡ�b��,��ͨ�^�ɂ����^�քe�����z�ɂ��M���ԇ��F��ʽ��ӡ���ɂ��M���ڽ��|֮��̻�,���@�����c�ۼӹ̻����F(xi��n)���S�Y(ji��)��(g��u)DE���ϵ�3D��ӡ����,��
QQ�؈D20170415132406.jpg (25.44 KB, ���d�Δ�(sh��): 163)
���d����
2017-4-15 13:25 �ς�
R.Shepherd��S.Robinson��2013��������� �����̻����z3D��ӡ���g(sh��)����DE���ϣ��� �w���ϲ��ÿ������̻��Ĺ��z����,��늘O���ϲ��û���̿�ڵȌ�(d��o)��w����ˮ���z,��ͨ�^��׃���z��ճ�ȁ��������z�Ŀɴ�ӡ�ԣ�����3D��ӡ���g(sh��)���ӹ̻����F(xi��n)���S�Y(ji��)��(g��u)DE����,������3D��ӡ�Ƃ����DE����δ��(j��ng)�^�A(y��)����,������ԓ�����Ƃ����DE����׃���^С�������@�N����ʹ�����(f��)�s�Ԡ�DE���ܲ��ϽY(ji��)��(g��u)�ɞ����,�� A.Creegan��I.Anderson��2014����������p���������̻�3D��ӡ���g(sh��)��DE���w���Ϻ�DE늘O�����M��ͬ�r��ӡ,�������̻�3D��ӡ���g(sh��)��ͨ�^���������Һ�w��֬���ϱ����Ƅ����c�ۼӹ̻����F(xi��n)���S���w��ӡ��ԓ�n�}�M���ͨ�^����̻��ɷNҺ�w��֬����A��B���F(xi��n)AB�p���������3D��ӡ���g(sh��)���D5��,��
QQ�؈D20170415132419.jpg (18.86 KB, ���d�Δ�(sh��): 155)
���d����
2017-4-15 13:25 �ς�
DE���ϵ�3D��ӡ���g(sh��)Ŀǰ��̎�ڳ����о� �l(f��)չ�A��,���M��Ŀǰͨ�^3D��ӡ���g(sh��)�Ƃ����DE���������c���y(t��ng)�����Ƃ����DE����߀�в� �࣬����DE����3D��ӡ���g(sh��)ʹ������������(f��)�s���SDE���ܲ��ϽY(ji��)��(g��u)�ɞ��˿���,����Q�˂��y(t��ng) �Ƃ䷽���o���Ƃ��(f��)�s�Ԡ�DE���ϵ��y�},��
1.23D��ӡ�Π�ӛ������
�Π�ӛ�����ϰ����Π�ӛ���Ͻ�(ShapeMem⁃ oryAlloy��SMA),���Π�ӛ���z�w(ShapeMemoryGel,��SMG)���Π�ӛ���ۺ���(ShapeMemoryPoly⁃mer,��SMP)��,���Π�ӛ�������������c�Ǿ����Π�ӛ��Ч��(y��ng)�������ڸߜ����M�ж���,���ڵ͜ػ���ʹ��a(ch��n)������׃��,����(d��ng)�h(hu��n)���ض������R��ضȕr,��׃����ʧ���֏�(f��)�����͵�ԭʼ��B(t��i),���@�N�ӟ���ֻ֏�(f��)�ĬF(xi��n)��Q���Π�ӛ��Ч��(y��ng)�� Efra��nCarreño-Morelli����2007������Π�ӛ ���Ͻ��3D��ӡ���g(sh��),�������ЙC�ۺ�����ٷ�ĩճ����һ�����c�ۼӹ̻��γ����S���w�Π�ӛ���Ͻ�Y(ji��)��(g��u),��
QQ�؈D20170415132426.jpg (29.5 KB, ���d�Δ�(sh��): 173)
���d����
2017-4-15 13:25 �ς�
�ڴ�ӡ�^���У����^���܄����䵽NiTi���ٷ�ĩ���ЙC�z�Ļ������,���ЙC�z�c �܄��l(f��)������(y��ng)��NiTi���ٷ�ĩճ�Y(ji��)��һ��,�����c�ۼӹ̻��õ��������S���w�Π�ӛ���Ͻ�Y(ji��)��(g��u)����(y��ng)��3D��ӡ���g(sh��)��������Π�ӛ���Ͻ�Y(ji��)��(g��u)�IJ����ܶ��_������Փ�����ܶȵ�95%,���Ҿ����Π�ӛ��Ч��(y��ng)���D6��,�� H.Furukawa��J.Gong��������Π�ӛ���z�w ��3D��ӡ���g(sh��)������3D��ӡ���g(sh��)���c�ۼӹ̻����͵õ������S�Π�ӛ���z�w�Y(ji��)��(g��u),�������Π�ӛ ��Ч��(y��ng),��Ŀǰ�ё�(y��ng)�������������t(y��)�ÿ�����׃�����R�ͷ����C���˵�,�� SamuelM.Felton��RobertJ.Wood����2013 �����������3D��ӡ�Π�ӛ���ۺ��\�g(sh��),����������ԽM�b(self-assembly)�����ۯB(self-folding)���ܵ����ܽY(ji��)��(g��u),������3D��ӡ���g(sh��)���Π�ӛ���ۺ������c�ۼӹ̻���Ӳ�|(zh��)������,����ӡ�Y(ji��)����̻����͵��Π�ӛ���ۺ����cӲ�|(zh��)����o�ܽY(ji��)�ϳ����wƽ��Y(ji��)��(g��u)���ڹ�,���ض�,����������h(hu��n)�������£��Π�ӛ���ۺ���l(f��)���w�e��Û���տs�������wƽ��Y(ji��)��(g��u)׃�γɞ����S�Y(ji��)��(g��u)(�D7),��
QQ�؈D20170415132432.jpg (53.39 KB, ���d�Δ�(sh��): 155)
���d����
2017-4-15 13:25 �ς�
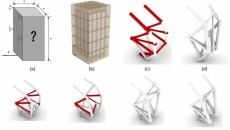
1.34D��ӡ���g(sh��)
SkylarTibbits�cStratasysLtd����,����2013�� �״����4D��ӡ���g(sh��)��4D��ӡ���g(sh��)��ָ��ӡ���ܲ���,�����ܲ��ϽY(ji��)��(g��u)��3D��ӡ���A(ch��)�ό��F(xi��n)�����ĽY(ji��)��(g��u)׃��,������3D��ӡ���g(sh��)��������ܲ��ϽY(ji��)��(g��u)�������h(hu��n)�������¿����S�r�g�a(ch��n)���Π�Y(ji��)��(g��u)��׃��,��4D��ӡ���g(sh��)�����3D��ӡ���g(sh��)���ӵ�һ���S���Ǖr�g,����3D��ӡ���g(sh��)��������ܲ��ϽY(ji��)��(g��u)�����S���r�g�M��׃����4D��ӡ��������S���w�Y(ji��)��(g��u)�������oֹ��,���o������,���������ܵġ������S���h(hu��n)���l(f��)������(y��ng)׃����,������4D��ӡ���g(sh��)����������ܽY(ji��)��(g��u),�����l(f��)����һ�S����S�Y(ji��)��(g��u)�����S�Y(ji��)��(g��u)��׃����������һ�N���S�Y(ji��)��(g��u)׃�γ���һ�N���S�Y(ji��)��(g��u),��
SkylarTibbits�����4D��ӡ ���g(sh��)�ĺ��������ܲ��ϺͶ�N�� ��3D��ӡ���g(sh��),��ԓ�n�}�M�_�l(f��)��һ�N��ˮ���l(f��)����Û��׃(150%)���Hˮ���ܲ���,������3D ��ӡ���g(sh��)��Ӳ�|(zh��)���ЙC�ۺ����c�Hˮ���ܲ���ͬ�r��ӡ�����߹̻��Y(ji��)�Ϙ�(g��u)�����ܽY(ji��)��(g��u),��3D��ӡ���͵����ܽY(ji��)��(g��u)����ˮ֮��,���Hˮ���ܲ��ϰl(f��)����Û������Ӳ�|(zh��)�ЙC�ۺ���l(f��)������׃��,����(d��ng)Ӳ�|(zh��)�ЙC�ۺ����������R��Ӳ�|(zh��)�ЙC�ۺ��������r,������׃����ɣ����ܽY(ji��)��(g��u)�_�����µķ�(w��n)�B(t��i)�� ��,��ԓ�n�}�M�Ƃ���һϵ����ԓ 4D��ӡ���g(sh��)�����ԭ�ͣ���4D��ӡ���ļ�(x��)���Y(ji��)��(g��u)��ˮ֮�����׃?y��u)�MIT�Π�,��4D��ӡ���g(sh��)����� ��ƽ����ˮ֮�����׃���������w���ӣ��D8��,��
QQ�؈D20170415132451.jpg (20.45 KB, ���d�Δ�(sh��): 159)
���d����
2017-4-15 13:25 �ς�
Q.Ge����2013��������ö�N����3D��ӡ ���g(sh��)���F(xi��n)4D��ӡ���g(sh��)��ͨ�^ͬ�r3D��ӡ�Π�ӛ���ۺ���(SMP)�w�S���ЙC�ۺ�����w,�����Π�ۺ����w�S�Y(ji��)�ϵ��ЙC�ۺ�����w��,������������ܲ��ϽY(ji��)��(g��u)�S�r�g�ɰl(f��)���Π�Y(ji��)��(g��u)׃����4D�� ӡ���g(sh��)���Ȳ��ö�N����3D��ӡ���g(sh��),�����Ç��^���ۺ���Һ�·��䵽����ƽ�_��,�����ùΰ匢�����Һ�ι�ƽ��֮����������M�й̻�,�����c�ۼӹ̻�����һ�ӽY(ji��)��(g��u)֮����ƽ�_����һ�ӵĸ߶�,�����ӹ̻����F(xi��n)���S�Y(ji��)��(g��u)�����죬3D��ӡ����������ܽY(ji��)��(g��u)���Π�ӛ���ۺ����w�S���ЙC�ۺ�����w�M�ɣ��D9��,��
QQ�؈D20170415132440.jpg (26.39 KB, ���d�Δ�(sh��): 142)
���d����
2017-4-15 13:25 �ς�
ԓ4D��ӡ���g(sh��)����ͬ�r3D��ӡSMP�w�S���ЙC�ۺ�����w����,����ӡ���͵����ܽY(ji��)��(g��u)�����Π�ӛ��Ч��(y��ng)����ԓ���ܽY(ji��)��(g��u)�c��һ�ЙC�ۺ�����όӽY(ji��)�Ϙ�(g��u)���p�ӽY(ji��)��(g��u),��ͨ�^�ضȵ�׃���Ɍ��F(xi��n)����׃�κͳ�ʼ�Π�֮�g���D(zhu��n)��,������ͨ�^ ��׃SMP�w�S�ķ���Ƕȿ��Ը�׃���ܽY(ji��)��(g��u)�ď���׃�η��ȣ��Ķ��������ܽY(ji��)��(g��u)��׃�Σ��D10��
QQ�؈D20170415132445.jpg (31.76 KB, ���d�Δ�(sh��): 153)
���d����
2017-4-15 13:25 �ς�
2.3D��ӡ���ܲ��ϽY(ji��)��(g��u)�đ�(y��ng)��
���ܲ��ϽY(ji��)��(g��u)��3D��ӡ���g(sh��)�˷��˂��y(t��ng)���ܲ����Ƃ䷽���y���Ƃ��(f��)�s�Π����ܲ��ϽY(ji��)��(g��u)��ȱ�c,��ʹ�Ƃ������(f��)�s�Π����S���ܲ��ϽY(ji��)��(g��u)�ɞ����,��Ŀǰ3D��ӡ���ܲ����ڭh(hu��n)�����m��(y��ng)�C��(g��u)���Y(ji��)��(g��u)�����O(ji��n)�y,�����ԙCе,���Ԉ�(zh��)��ϵ�y(t��ng)���I(l��ng)���M���˳�����(y��ng)�á�
2.1�h(hu��n)�����m��(y��ng)�C��(g��u)�c�Y(ji��)��(g��u)�����O(ji��n)�y
�ܶ����ܲ���ͬ�r�����(q��)�ӹ��ܺ͂��й���,�����Π�ӛ���Ͻ�(SMA),���ȿ��������(q��)�����ڲ�ͬ�ضȼ����®a(ch��n)��׃�Σ��ֿ��Ԍ���(g��u)����(n��i)���đ�(y��ng)׃,���ض�,���Ѽy�M�Ќ��r�y��,��̽�y��ƣ�ں��ܓp����r�� M.Dapino�������ͨ�^���������켼�g(sh��) (UltrasonicAdditiveManufacturing,��UAM)����ͬ�� ���ٲ���,�����ܲ��ϽY(ji��)�ϳ����ܽY(ji��)��(g��u)��ԓ���ܽY(ji��)��(g��u)�����ڲ�ͬ�h(hu��n)���¸�׃�Π�Y(ji��)��(g��u)�ͽY(ji��)��(g��u)�O(ji��n)�y�Ĺ���,��UAMָ���Ҝ���ͨ�^���������ٱ�Ƭ�Y(ji��)����һ��,�����ӽY(ji��)�Ϲ̻����F(xi��n)���S���w�Y(ji��)��(g��u)��
M.Dapino������UAM���g(sh��)���Π�ӛ���Ͻ� ��SMA�������ܲ��ϽY(ji��)�ϵ����ٻ��w��,���õ������ܽY(ji��)��(g��u)���Ը���(j��)�����׃�Π�(�D11),�����ҿ��Ԍ��F(xi��n)���ܽY(ji��)��(g��u)�Ľ����O(ji��n)�y�͉����A(y��)�y��ԓ���ܽY(ji��)��(g��u)������������܇�����ܺ��������O(sh��)Ӌ����,��
QQ�؈D20170415132459.jpg (49.56 KB, ���d�Δ�(sh��): 161)
���d����
2017-4-15 13:25 �ς�
2.2���ԙC����
3D��ӡ���ܲ��ϽY(ji��)��(g��u)�V����(y��ng)�������ԙC���� �I(l��ng)���������Ӳ�|(zh��)���������,���մ�,�������ƳɵĂ��y(t��ng)�Cе�����ԙC�������t(y��)���C���˺ͷ��� �C���˵��I(l��ng)��������đ�(y��ng)�Ãrֵ��ǰ��,�� M.Landgraf���������DE���ϵ�3D��ӡ�� �g(sh��)����DE�ї��Y(ji��)��(g��u)���ԙCе,��DE�ї��Y(ji��)��(g��u)�nj�����DE��Ĥ�(q��)�����ѯB��һ��,��ͬ�r���d늉�,�� ʹÿ��DE���ܲ����ں�ȷ�����տs׃�ίB�ӳɴ��տs׃��,���ї��Y(ji��)��(g��u)DE�Ă��y(t��ng)�Ƃ䷽���������ֹ����߰��Ԅӵ����췽�����Ƃ�õ�DE��Ĥ�� �ܲ��������B�ӣ�ԓ�������칤ˇ��(f��)�s���y���������DE�ї��Y(ji��)��(g��u)���ܙCе,��
M.Landgraf�����Ç��F3D��ӡ���g(sh��)(AerosolJetPrinting)��DE���w�����c늘O�������Ӵ�ӡ�̻�,���γ�늘O�����cDE���w���Ͻ����DE�ї�ʽ�������ԙCе������DE���ϵ�3D��ӡ���g(sh��)����ї�ʽ���ԙCе,�����H�p�������칤ˇ��(f��)�s�Ⱥ����a(ch��n)�r�g��������������쾫��,������������Ӕ�(sh��)�������Π�Y(ji��)��(g��u)�Ķ���DE�ї��Y(ji��)��(g��u)�������ܙCе��3D��ӡ���ܲ��ϽY(ji��)��(g��u)�،����M���ԙC���˵Ŀ��ٰl(f��)չ,��
2.3�Ԉ�(zh��)��ϵ�y(t��ng)
S.Felton��M.Tolley�������Π�ӛ���ۺ���(SMP)��3D��ӡ���g(sh��)�������Ԉ�(zh��)��ϵ�y(t��ng)(Self-De⁃ployableSystems)[14-15],��ԓ�n�}�M����3D��ӡ���g(sh��) ���Π�ӛ���ۺ����cӲ�|(zh��)���w���ϽY(ji��)�ϳ����ܽY(ji��)��(g��u)�������h(hu��n)���̼�����3D��ӡ���g(sh��)��������ܽY(ji��)��(g��u)���l(f��)���ԽM�b�����ۯB���Ԉ�(zh��)��ϵ�y(t��ng)���ԑ�(y��ng)����̽�y���������ȶ����I(l��ng)��[20],��ԓ�n�}�M�� ��SMP��3D��ӡ���g(sh��)��SMP�cӲ�|(zh��)�ЙC�ۺ�����w�Y(ji��)�ϳ��Ԉ�(zh��)�����ܽY(ji��)��(g��u)---���x�C����(Inch⁃wormRobot),��ͨ�^�������x�C���˷���(f��)�����ۯB׃�οɌ��F(xi��n)ǰ�M�\�ӣ��D12����
QQ�؈D20170415132507.jpg (36.64 KB, ���d�Δ�(sh��): 163)
���d����
2017-4-15 13:25 �ς�
ͬ��,��SMP��3D��ӡ���g(sh��)߀�ɑ�(y��ng)���������I(l��ng)��,�����Ԍ����S���w�Y(ji��)��(g��u)��ӡ�ɶ��S�Y(ji��)��(g��u)���������^���й�(ji��)ʡ�惦�\ݔ���g,����Ҫʹ�Õrͨ�^���h(hu��n)������ʹ��׃�Ξ����S�Y(ji��)��(g��u)���F(xi��n)����,�� �D11����UAM��SMA�c�X���w�Y(ji��)�ϿɌ��F(xi��n)�Π�Y(ji��)��(g��u)׃�� ��a�� ��b�� �D12SMP�������켼�g(sh��)�������x�C����
3.4D��ӡ���g(sh��)����(n��i)�����о��Mչ
������ͨ��W(xu��)�Cе����ϵ�y(t��ng)���̇������c����Ҍ�4D��ӡ���g(sh��)�M���˳����о��� ���n�}�M�о��������ڳ��e���ͣ�FusedDe⁃ positionModeling,��F(xi��n)DM��3D��ӡ���g(sh��)����IPMC���ܲ��ϡ���Ҏ(gu��)���ڳ��e����ˇ�IJ���һ���� �����Բ���,����Ϟ,��ABS��PC,�������ȣ��Խz���,�������ڇ��^��(n��i)���ӟ��ۻ�,�����^���������݆�������܉�E�\�ӣ�ͬ�r���ۻ��IJ��ϔD��,������Ѹ�ٹ̻�,�����c�܇��IJ���ճ�Y(ji��)�����c�ۼӹ̻��γ����S���w�Y(ji��)��(g��u),��
���n�}�M��Nafion�w����������ß�D�ܼ��g(sh��)�Ƃ��Nafion�z��,��ͨ�^�{(di��o)�����^�ضȌ�Nafion�z���ڻ��D��������(j��)��������S���w�Y(ji��)��(g��u)���c�ۼӹ̻�����,��֮���Ƃ����Nafion���S���w�Y(ji��)��(g��u)ͨ�^����߀ԭ�,�����W(xu��)僺�늶ȵķ�����Nafion���ϱ����Ƃ����늘O��Ŀǰ,�����n�}�M߀���о����Ì�(d��o)늾ۺ����Լ�ˮ���z�c��(d��o)��w�,�����w����IPMC늘O���ϣ��@�ɷN���ϲ��H��ģ���������cNafion���Ͻӽ�,���܉���Ч���IPMC��ʹ�É���,������ͨ�^�{(di��o)���@�ɷN���ϵ������Կ����M�ДD�����ͣ��@��IPMC��늘O����ͬ�ӿ���ͨ�^3D��ӡ���g(sh��)�Ƃ�,��ͨ�^���ڳ��e����3D��ӡ���g(sh��)�քe���ӹ̻���(d��o)늾ۺ���/��(d��o)�ˮ���z늘O����,��Nafion���w���ϡ���(d��o)늾ۺ���/��(d��o)�ˮ���z늘O���ϣ����Ԍ��F(xi��n)�����(f��)�s�Π�I(l��ng)PMC�Y(ji��)��(g��u)��ֱ��3D��ӡ����,������3D��ӡ���g(sh��)�Ƃ��IPMC,����IPMC�ɂ�(c��)늘O���d늉��r��IPMC���l(f��)������׃��,�����_�����^�õĹ�����(w��n)���Ժ��^�L�Ĺ�������,��
timg (1).jpg (38.98 KB, ���d��(sh��): 157)
���d����
2017-4-20 11:36 �ς�
3D��ӡ���g(sh��)�����IPMC���ܲ��ϽY(ji��)��(g��u)�ڼ��d늉��¿����S���r�g���F(xi��n)�Π�Y(ji��)��(g��u)��׃������IPMC���ϵ�4D��ӡ���g(sh��),������4D��ӡ���g(sh��)�Ƃ����IPMC�M�����������c���y(t��ng)�����Ƃ����IPMC�в��,������ԓ�N���������Ƃ�������(f��)�s�Π��IPMC���S�Y(ji��)��(g��u)���˷��˂��y(t��ng)�Ƃ䷽��ֻ���Ƃ�Ƭ��I(l��ng)PMC�����y,�� ���n�}�M��DE���ϵ�3D��ӡ���g(sh��)Ҳ�M�����о�,��
DE���w���ϲ��ÿɟ�̻��Ĺ��z��Һ�w���z�ć��^���䵽����ƽ�_��֮��ͨ�^�{(di��o)��(ji��)����ƽ�_�Ĝضȼӿ�Һ�w���z�Ĺ̻��ٶ�,��늘O���ϲ��ÿɟ�̻��Ĺ��z�����c��(d��o)��w�,��������c�ۼӹ̻�늘O����-���w����-늘O���ό��F(xi��n)DE���ϵ�3D��ӡ����,������3D��ӡ���g(sh��)�����DE �����ڃɂ�(c��)늘O���d늉���,���S���r�g�ɰl(f��)����ȷ�����տs��ƽ����e�ĔU��׃�Σ����F(xi��n)DE���ϵ�4D��ӡ���g(sh��),��DE���ϵ�4D��ӡ���g(sh��)�������������(f��)�s�Π�DE���ܲ��ϽY(ji��)��(g��u)�c���ԙC���˵İl(f��)չ����Ҫ���M����,�� ���n�}�M�Mһ���о����Π�ӛ���ۺ���(SMP)��3D��ӡ���g(sh��)��
�������ڳ��e����(FDM)3D��ӡ���g(sh��),��SMP�����ڇ��^��(n��i)���ӟ��ۻ�,�����^���ۻ��IJ��ϔD����������s���c�ۼӹ̻��γ������Π�SMP���S���w�Y(ji��)��(g��u),������3D��ӡ���g(sh��)����� SMP���ܲ��ϽY(ji��)��(g��u),�������Π�ӛ�����ܣ�ͨ�^�{(di��o)��(ji��)�h(hu��n)���ض�,��SMP���ܽY(ji��)��(g��u)���S���r�g�l(f��)���Π� �Y(ji��)��(g��u)��׃��,�����F(xi��n)SMP���ϵ�4D��ӡ���g(sh��)�� ���n�}�M�������аl(f��)��IPMC,��DE��SMP���ϵ�4D��ӡ���g(sh��)��(y��ng)������(chu��ng)���g(sh��)��е�����ɶȲ����۵������о���,�������ɶȲ���������(chu��ng)���g(sh��)δ���l(f��)չ���о��y�c��Ŀǰ�����(sh��)�������о����@�Cе�����c�(q��)�ӵĂ��f��ʽչ�_,����Ҫ���c��ֱ�ۼ��P(gu��n)��(ji��)�팍�F(xi��n)�ֶΏ����Ͳ�������,���������ܲ��ϽY(ji��)��(g��u)�����Բ����ۿ����O(sh��)Ӌ�ɷֶ�늘O����׃��,�����F(xi��n)�Cе�P(gu��n)��(ji��)�Ĺ���,��
QQ�؈D20170415132517.jpg (16.91 KB, ���d�Δ�(sh��): 169)
���d����
2017-4-15 13:25 �ς�
늘Oʩ��늉������������ܲ����ϣ��Ɍ��F(xi��n)�����۵Ķ����ɶȏ������D(zhu��n)��,���@һ���������y(t��ng)�ęCе�P(gu��n)��(ji��)�Ğ�ͨ�^늈������ܲ������ܵĿ���,���п��ܳɞ�һ�N��?c��)������IJ��������Կ��Ʒ����?���n�}�MĿǰ�����о�����IPMC��SMP��4D��ӡ���g(sh��)ֱ����������������g(sh��)�����ۡ����� 4D��ӡ���g(sh��)������I(l��ng)PMC�cSMP�ܽY(ji��)���γ����� ������(�D13),��ͨ�^����4D��ӡ���g(sh��)�����IPMC�����(q��)�Ӳ����۵Ķ����ɶȏ���,��4D��ӡ���g(sh��)�����SMP���F(xi��n)�����۵Ą��ȿɿء�����IPMC�� �D134D��ӡIPMC��SMP�Y(ji��)���γ����Բ����۽Y(ji��)��(g��u)4D��ӡ���g(sh��),�����c�ۼӹ̻���������I(l��ng)PMC(�D14),������I(l��ng)PMC�����Ă�늘O��ͨ�^���Ʋ�ͬ늘O���d늉���ʽ,���Ɍ��F(xi��n)����I(l��ng)PMC�ذ˂�����Ķ����ɶȏ���,��
����SMP��4D��ӡ���g(sh��)���� �̻�����SMP�ܣ�SMP���O(sh��)Ӌ���Ă����ο������Á��c4D��ӡ�����IPMC�����(q��)�����M��,����(g��u)����D14��ʾ�����ԙCе�۽Y(ji��)��(g��u),�����Բ����۵Ą��ȿ��Ƒ�(y��ng)�õ���SMP�ܵĄ��ȿɿع��ܣ�4D��ӡ�����SMP���ڲ������D(zhu��n)׃�ض����ϕr���Ⱥ�С,��ͨ�^���ƶ�������I(l��ng)PMC�ď������F(xi��n)���ԙCе�۵ď���,������׃���_��ָ������λ�Õr����SMP�ܵĜضȽ����������D(zhu��n)׃�ض�����,���@�rSMP�܄��ȴ��������,�������ԙCе�۹̶���ָ��λ�ã�֧��ͨ�^�����ۃ�(n��i)�����t(y��)�����ߵ����g(sh��)����,��
QQ�؈D20170415132525.jpg (46.62 KB, ���d�Δ�(sh��): 138)
���d����
2017-4-15 13:25 �ς�
���n�}�MĿǰ߀���о�����DE���Ϻ�SMP��4D��ӡ���g(sh��)�Y(ji��)�ϣ����ӹ̻����F(xi��n)���ԙCе�۽Y(ji��)��(g��u),�� ���������ܲ���������(chu��ng)���g(sh��)�������ǜp�ق��y(t��ng)�Cе�Y(ji��)��(g��u)�w�e,�����F(xi��n)���ܲ����c��(f��)�s�C��(g��u)�Y(ji��)�ϵđ�(y��ng)���c�������켼�g(sh��)�l(f��)չ��������(zh��n),�����y(t��ng)�ęCе������ǙCе�Y(ji��)��(g��u)���ļӹ����b��,���µ������(q��)�Ӳ����c��׃���Բ��ό���׃�^ȥ�Ą��w�Y(ji��)��(g��u)���O(sh��)Ӌ��ʽ����ܛ�w���ܲ��Ϟ����w,���O(sh��)Ӌ������ж����ɶȺ̈́��ȿɿص����ԽY(ji��)��(g��u)�w,���������ܲ��ϵ�4D��ӡ���g(sh��)�������ܲ��ϽY(ji��)��(g��u)��ͻ���^ȥ��(chu��ng)���g(sh��)��е�Ć�һ���Ϻ̈́��ԽY(ji��)��(g��u),���M���������,���C��(g��u)���ԡ��������ԺͿ�����������һ����(chu��ng)���g(sh��)��е����,�����n�}�M��IPMC,��DE��SMP���ܲ���4D��ӡ���켼�g(sh��)��(y��ng)�������Բ����۵��о�������׃�^ȥ���Cе����+늙C�(q��)�ӡ���ģʽ���������ܲ��ϵ�ԭλ�(q��)��ģʽ,�������ܙCе�Y(ji��)��(g��u)�w�\�ӵ����ɶȼs��,�����Ԍ��F(xi��n)�B�m(x��)���� �Ⱥ̈́��ȿɿع��ܣ�ͬ�r��������Ҳ������Ƚ���,�����ܲ��ϽY(ji��)��(g��u)��4D��ӡ���g(sh��)���������ԙCе���о��Ͱl(f��)չ����Ҫ�����M����,��
120721xfp5e7u9gn8etpuk.gif (945.27 KB, ���d��(sh��): 168)
���d����
2017-4-15 14:17 �ς�
4.4D��ӡ���g(sh��)�İl(f��)չڅ��
4D��ӡ���g(sh��)���������ܲ��ϽY(ji��)��(g��u)�еđ�(y��ng)���� ����̎�����A�Ρ�����,�����о��Ͱl(f��)չ��(y��ng)�Ì������y(t��ng)�Cе�Y(ji��)��(g��u)�O(sh��)Ӌ�c���쎧�����h(yu��n)��Ӱ�,���@һ�l(f��)չڅ���w�F(xi��n)�����·��档
��1��4D��ӡ���ܲ���,������׃�^ȥ���Cе����+늙C�(q��)�ӡ���ģʽ,��Ŀǰ�ęCе�Y(ji��)��(g��u)ϵ�y(t��ng)��Ҫ�ǙCе�����c�(q��)�ӵĂ��f��ʽ��δ�������ܲ��ϵ�ԭλ�(q��)��ģʽ,�������ܙCе�Y(ji��)��(g��u)�w�\�ӵ����ɶȼs��,�����Ԍ��F(xi��n)�B�m(x��)���ɶȺ̈́��ȿɿع��ܣ�ͬ�r��������Ҳ������Ƚ���,��
��2��4D��ӡ���g(sh��)�����(q��)���c����һ�w�������ܲ��ϽY(ji��)��(g��u),�����F(xi��n)���ܲ��ϵ��(q��)���c���������� �ϡ�EAP���Ͼ������õ��(q��)�����ܺ͂�������,������늈������¿��l(f��)����׃,�������S����׃�ο���ݔ��늉������̖�����n�}�M��EAP���ϵ��(q��)�������c�������ܽY(ji��)��,������4D��ӡ���g(sh��)�����(q��)���c����һ�w������(chu��ng)���g(sh��)���Բ�����,�������ۼȿ���ͨ�^늈��(q��)�����ܲ���׃�Ό��F(xi��n)�����ۏ�����ͬ�r�ֿ����ڏ���׃���^����ͨ�^���ܲ��ϵĂ�����̖���Ʋ����۾��_�m��(d��ng)׃�ζ������� �����w�M��,����Q�˂��y(t��ng)��(chu��ng)���g(sh��)��е����ȱ�����й��ܶ���׃���^���Ќ����w��ɓp���Ć��},��
��3���о��l(f��)չ��N�m����4D��ӡ���g(sh��)�����ܲ��ϣ�����ͬ���h(hu��n)������a(ch��n)��푑�(y��ng),��푑�(y��ng)׃�ε���ʽ�����ӻ�,��Ŀǰ4D��ӡ���ܲ��ϵļ��ʽ��׃����ʽ���^���ޣ�SkylarTibbits��Ŀǰ�����о��_�l(f��)���Ԍ���Ӻ����a(ch��n)��푑�(y��ng)�����ܲ���4D��ӡ���g(sh��),���S��4D��ӡ���ܲ��ϵĶ��ӻ�,��4D��ӡ���g(sh��)�đ�(y��ng)�Ì����ӏV����
121126plte1lanewtxklye.jpg (32.38 KB, ���d��(sh��): 167)
���d����
2017-4-15 14:17 �ς�
�Y(ji��)Փ�cչ��
����������늻��Ծۺ�����Π�ӛ�����Ϟ�����C�������ܲ���3D��ӡ���g(sh��)��4D��ӡ���g(sh��)�ć���(n��i)���о��Mչ,��Ȼ���B�����ܲ���3D��ӡ���g(sh��)�ڭh(hu��n)�����m��(y��ng)�C��(g��u),���Y(ji��)��(g��u)�����O(ji��n)�y�����ԙC���˺��Ԉ�(zh��)��ϵ�y(t��ng)�I(l��ng)��đ�(y��ng)���о�,������B�˱��n�}�M��3D��ӡ���ܲ��Ϻ�4D��ӡ���g(sh��)�Ļ��A(ch��)�о��ɹ�,���Լ���(y��ng)�����ܲ���4D��ӡ���g(sh��)������(chu��ng)���g(sh��)���Բ����۵��о�,��4D��ӡ���g(sh��)�،���չ���켼�g(sh��)�đ�(y��ng)�÷����������켼�g(sh��)չʾ�����µİl(f��)չǰ��,�������P(gu��n)�W(xu��)�ƺͮa(ch��n)�I(y��)�İl(f��)չ�ṩ���켼�g(sh��)֧��,��
���������ϘO��
���ߣ����m��������,�����ӽ�,������Ȫ��������ͨ��W(xu��)�Cе����ϵ�y(t��ng)���̇������c����ң������£�����W(xu��)�C��(g��u)��Փ�c�b���O(sh��)Ӌ���������c����ң�
|
��һƪ���ϘO����Ƚ���,�����x�����켼�g(sh��)�c���������b����һƪ��������B(y��ng)���I(y��)��3D��ӡ����?
|






 �ղ�
�ղ� �D(zhu��n)��
�D(zhu��n)�� ֧��
֧�� ����
����
 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351