來源:水凝膠
為了減輕高溫的不利影響,傳統(tǒng)的剛性設(shè)備使用笨重的散熱器,散熱器和風(fēng)扇來散發(fā)敏感組件的熱量。不幸的是,這些溫度調(diào)節(jié)策略與軟機(jī)器人不兼容,軟機(jī)器人是一個(gè)不斷發(fā)展的技術(shù)領(lǐng)域,就像生物學(xué)一樣,它利用軟材料來構(gòu)建順應(yīng)性和高度可變形的物體,以實(shí)現(xiàn)功能適應(yīng)性。最近,康奈爾大學(xué)Thomas J. Wallin教授團(tuán)隊(duì)設(shè)計(jì)了可在高溫下自動(dòng)排汗的流體彈性體執(zhí)行器。

e850352ac65c1038237f1bbb69fda51bb17e89bf.jpg (19.38 KB, 下載次數(shù): 136)
下載附件
2021-3-19 12:39 上傳
這種策略會(huì)引起操作上的損失(即,降低的致動(dòng)效率和液壓流體的損失),但是提供了軟系統(tǒng)中的溫度調(diào)節(jié)。在這種受生物啟發(fā)的方法中,從帶有嵌入微孔的智能凝膠中3D打印手指狀致動(dòng)器,這些微孔可根據(jù)溫度自動(dòng)擴(kuò)張和收縮。在高溫運(yùn)行期間,內(nèi)部液壓流體流經(jīng)膨脹的孔,吸收熱量并蒸發(fā)。冷卻后,孔收縮以限制流體損失并恢復(fù)運(yùn)行。為了評(píng)估溫度調(diào)節(jié)性能,該協(xié)議使用非侵入式熱成像技術(shù)來測(cè)量變化條件下機(jī)器人的局部溫度。基于牛頓冷卻定律的數(shù)學(xué)模型可以量化冷卻性能,并可以在競(jìng)爭(zhēng)設(shè)計(jì)之間進(jìn)行比較。出汗執(zhí)行器的制造通常需要3–6小時(shí),具體取決于尺寸,并且可以提供> 100 W / kg的額外冷卻能力。相關(guān)論文以題為Making bioinspired 3D-printed autonomic perspiring hydrogel actuators發(fā)表在《Nature Protocols》上
實(shí)驗(yàn)步驟的發(fā)展
自主排汗水凝膠致動(dòng)器的材料設(shè)計(jì)與制造
合成水凝膠(即親水性聚合物網(wǎng)絡(luò))經(jīng)常用于受生物啟發(fā)的系統(tǒng)中。軟機(jī)器人中常見兩類水凝膠致動(dòng)器:流體彈性體致動(dòng)器(FEA)和滲透性致動(dòng)器。流體執(zhí)行器的工作方式類似于帶圖案的氣球;在內(nèi)部通道加壓期間,彈性體根據(jù)應(yīng)變限制元件的結(jié)構(gòu)布置而改變形狀(圖1a)。相比之下,滲透驅(qū)動(dòng)的“智能”水凝膠可逆地將大量溶劑直接吸收到聚合物網(wǎng)絡(luò)中,以響應(yīng)細(xì)微的環(huán)境變化而多次改變其體積。混合物(溶劑-聚合物系統(tǒng))的化學(xué)勢(shì)能與網(wǎng)絡(luò)的彈性勢(shì)能之間的能量平衡決定了這種動(dòng)態(tài)行為。當(dāng)溶劑與凝膠的相互作用良好時(shí),溶劑分子沿化學(xué)勢(shì)梯度擴(kuò)散,使聚合物溶脹,直到與拉伸網(wǎng)絡(luò)的彈性勢(shì)平衡為止。如果相互作用不利,則彈性能占主導(dǎo),并且凝膠排出溶劑分子并塌陷。總的來說,與智能凝膠相比,有限元分析雖然能耗更高,效率更低,但可提供更快(f> 1 Hz),大規(guī)模,高力的驅(qū)動(dòng)力。因此,我們的設(shè)計(jì)采用了液壓驅(qū)動(dòng)的有限元分析法,并由包含滲透壓驅(qū)動(dòng)微孔的水凝膠層覆蓋。
e1fe9925bc315c603f4b236a505dfd1b4b547749.png (161.74 KB, 下載次數(shù): 133)
下載附件
2021-3-19 12:39 上傳
圖1:受生物啟發(fā)的3D打印水凝膠致動(dòng)器。a,采用多材料印刷的高表面積設(shè)計(jì)執(zhí)行器。b,執(zhí)行器設(shè)計(jì)的分解圖。c,在不同環(huán)境中液壓加壓時(shí),孔隙響應(yīng)與執(zhí)行器性能之間的比較。d,加壓前后出汗執(zhí)行器的實(shí)際圖像。
用于自主毛孔的智能材料的表征
用質(zhì)量(重量)和尺寸變化(直接成像)來量化腫脹程度,這兩種方法都涉及受過本科程度培訓(xùn)的研究人員可以使用的簡(jiǎn)單方法。如圖2所示,適當(dāng)?shù)挠?jì)劃可以同時(shí)收集兩個(gè)數(shù)據(jù)流。
6f061d950a7b02082a72b555be35c4db552cc8c4.png (165.49 KB, 下載次數(shù): 125)
下載附件
2021-3-19 12:39 上傳
圖2:智能毛孔的特征。a,用于孔分析的實(shí)驗(yàn)裝置。b,多孔水凝膠在不同溫度下的代表性圖像。
執(zhí)行器的機(jī)械性能
faf2b2119313b07e9b0b99c5ef3ba72b95dd8cba.png (178.4 KB, 下載次數(shù): 98)
下載附件
2021-3-19 12:39 上傳
圖3:用于性能測(cè)試的機(jī)器人系統(tǒng)。a,單個(gè)執(zhí)行器組裝在3D打印的支架中。b,擬人柔軟的手。c,機(jī)器人三點(diǎn)抓取器。
060828381f30e924850f6d75a8e4580e1f95f7c4.png (173.11 KB, 下載次數(shù): 105)
下載附件
2021-3-19 12:39 上傳
圖4 機(jī)械和出汗測(cè)試的實(shí)驗(yàn)裝置。
預(yù)期結(jié)果
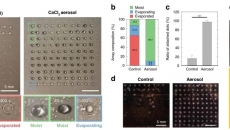
該協(xié)議概述了出汗的有限元分析的設(shè)計(jì)和制造。水凝膠化學(xué)的立體光刻印刷產(chǎn)生了具有生物啟發(fā)的具有動(dòng)態(tài)微孔的軟機(jī)器人,該微孔可以根據(jù)溫度自動(dòng)擴(kuò)張和收縮。如圖5a所示,適當(dāng)?shù)牟牧线x擇和設(shè)計(jì)應(yīng)產(chǎn)生孔隙,該孔隙的橫截面積會(huì)隨溫度顯著變化(> 25%)。為了穩(wěn)定的自主運(yùn)行,這種尺寸變化應(yīng)該是可逆的。如圖5b所示,我們的水凝膠系統(tǒng)能夠在有利的條件(水,25°C)和不利的條件(非溶劑)之間經(jīng)歷許多膨脹和收縮循環(huán)。
a8773912b31bb051fa3d73a3eb96ecbc4bede011.jpg (33.12 KB, 下載次數(shù): 150)
下載附件
2021-3-19 12:39 上傳
圖5:水凝膠孔的動(dòng)態(tài)響應(yīng)。a,響應(yīng)于溫度,不同直徑的基于PAAm的孔的尺寸變化。b,在有利和不利條件下水凝膠反應(yīng)的可逆性。
在圖6a中,展示了一個(gè)示例執(zhí)行器,該執(zhí)行器根據(jù)上述協(xié)議進(jìn)行了打印,并在出汗過程中加壓以獲得不同的執(zhí)行幅度。在圖6b中,在自由對(duì)流(黑線)和強(qiáng)制對(duì)流(紅線)的環(huán)境中測(cè)量了這些出汗執(zhí)行器(實(shí)線)和非出汗執(zhí)行器(虛線)的表面溫度。
3801213fb80e7bec2814c71ff3c28f3099506b73.png (344.99 KB, 下載次數(shù): 129)
下載附件
2021-3-19 12:39 上傳
圖6:出汗執(zhí)行器的性能。a,致動(dòng)器被加壓至不同的致動(dòng)角度和出汗。b,在自由(黑色)和強(qiáng)制(紅色)對(duì)流模式下,出汗(虛線)和不出汗(實(shí)線)執(zhí)行器的溫度變化。陰影區(qū)域代表三個(gè)試驗(yàn)中的溫度范圍。c,由出汗的執(zhí)行器組成的機(jī)械手,通過出汗迅速調(diào)節(jié)溫度。
但是,這些從執(zhí)行器表面掉落的水滴可用于冷卻其周圍環(huán)境,從而實(shí)現(xiàn)熱操縱。在圖7a中,示出了聚氨酯泡沫物體在環(huán)境條件下被動(dòng)冷卻。相比之下,在圖7b中,相同的對(duì)象是由由出汗致動(dòng)器組成的機(jī)器人抓取器進(jìn)行熱操作的。手抓其的分泌水會(huì)迅速冷卻物體表面,從而使冷卻速度提高200%以上。
728da9773912b31b88244a936ff40072dbb4e131.png (512.65 KB, 下載次數(shù): 160)
下載附件
2021-3-19 12:39 上傳
圖7:抓握物體的熱操縱。a,聚氨酯泡沫物體在空氣中被動(dòng)冷卻。b,由于由出汗致動(dòng)器組成的機(jī)器人抓手分泌出汗,同一聚氨酯泡沫物體迅速冷卻。
參考文獻(xiàn):doi.org/10.1038/s41596-020-00484-z
| 








 收藏
收藏 轉(zhuǎn)播
轉(zhuǎn)播 支持
支持 反對(duì)
反對(duì)
 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351