2021年9月29日,,南極熊獲悉,,最近國外的一個“開放式動態(tài)機器人計劃(ODRI)”已經開發(fā)出3D打印四足機器狗和兩足機器人,,而且可以通過Wi-Fi遠程控制。
這個項目最開始是想開發(fā)一個低成本的基于無刷電機的模塊,,能夠用于開發(fā)各類機器人�,,F在這個項目已經進行了5年時間,將開發(fā)平臺與3D打印,、廉價的PCB和現成的組件相組合,,就能夠以波士頓動力機器狗(售價74,500美元)一小部分的成本就能夠制造機器人。
目前ODRI的開發(fā)模塊已經制造了一個名為Solo的3D打印機器人狗和一個名為Bolt的的雙足機器人,。

Solo12 outdoor experiment at LAAS, Autonomy Update[00-00-16--00-00-20].gif (1.61 MB, 下載次數: 89)
下載附件
2021-9-29 10:52 上傳
什么是開放式動態(tài)機器人計劃(ODRI),?
ODRI是一個合作性的開源項目,由幾個機器人研究機構組成:運動生成和控制小組,、馬克斯-普朗克智能系統研究所,、紐約大學坦登工程學院和LAAS/CNRS。
這項工作最終的目的是滿足機器人研究界的需求,,很多機構都在尋求一種低成本,、輕量級的靈活研究平臺。ODRI的機器人開發(fā)模塊在很大程度上可以3D打印,,并且完全可以升級和修改,,為預算有限的機器人團隊提供了一條低成本的先進研發(fā)途徑。
ODRI表示,,機器人平臺可用于研究基于動物的肢體在礫石,、土壤,、沙子和泥土等表面的運動,以及跑酷等復雜行為的強化學習,。其中一些研究在高成本的平臺上嘗試會有很大的風險,。此外,它還可以用來研究環(huán)境操縱動作,,如開門或按下按鈕,,以及與5G無線等先進通信技術的整合。
A set of new tests on Bolt.[00-01-37--00-01-41].gif (1.27 MB, 下載次數: 81)
下載附件
2021-9-29 11:21 上傳
將Wi-Fi整合到一起
雖然這個平臺開發(fā)了多年,,并取得了不少的成果,,但最新的創(chuàng)新之一是整合了Wi-Fi連接。機器人的算法閉環(huán)控制托管在一個單獨的PC上,,而不是一個板載計算機,。在機器人身上安裝的主要是控制驅動單元、無刷直流電動機,、一個無線控制器和電池,。
對于這樣的項目,通常的標準做法是利用腿部單元的傳感器,,在本地計算所有的定位,、扭矩和速度。然而,,在本地計算運動規(guī)劃需要相當大的本地處理能力,,這使得開發(fā)更加困難,因為你必須把一臺大功率的PC裝進一個很小的空間--特別是如果你打算對該設備進行編程以執(zhí)行復雜的運動,。
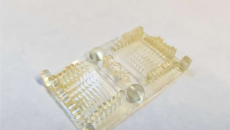
憑借最小的電子元件和輕量級的3D打印部件,ODRI成功地將機器人狗的變體Solo降低到總質量僅為2.2公斤,,站立時臀部高度約為24厘米,。
solo2.png (828.19 KB, 下載次數: 111)
下載附件
2021-9-29 11:36 上傳
△3D打印的機器人狗Solo
關于機器人開發(fā)模塊的更多細節(jié)可以這篇論文中找到 "An Open Torque-Controlled Modular Robot Architecture for Legged Locomotion Research "。此外,,該機器人的開源文件可以在項目的GitHub上找到,。
微信截圖_20210929113752.jpg (152.42 KB, 下載次數: 83)
下載附件
2021-9-29 11:38 上傳
與此類似,XRobots公司的機器人工程師和3D打印YouTuber網友James Bruton最近開始了他的3D打印機器人狗的V3版工作,。這個被稱為openDog的開源項目已經運行了幾年,,除了電機、軸承和其他一些部件外,,完全可以在低成本的FDM系統上進行3D打印,,比如布魯頓剛好使用的LulzBot TAZ Workhorse。
James-Bruton-next-to-openDog-V3-which-is-still-in-devlopment.-Photo-via-James-Bruton..png (2.37 MB, 下載次數: 86)
下載附件
2021-9-29 11:40 上傳
|
上一篇:3D打印,、VR、AR……1600件中國歷代繪畫精品“活”了下一篇:參數革新 | 全新90μm層厚金屬3D打印工藝,,進一步提升打印效率
|
 收藏
收藏 轉播
轉播 支持
支持 反對
反對








 京公網安備11010802043351
京公網安備11010802043351