上一篇:3D打印“十二獸首”將現(xiàn)文博會 下一篇:攻克技術(shù)難題,,鑫精合實現(xiàn)純鎢材料打印 | |
相關(guān)帖子
|
|

Protolabs 2025 Q1財報解讀:營收1.262億美

央視報道:南方科技大學(xué)葛锜教授離心式DLP

Velo3D聯(lián)手武器制造商OOW,利用金屬增材制

佛羅里達國際大學(xué)開發(fā)3D打印生物瓷磚系統(tǒng),,
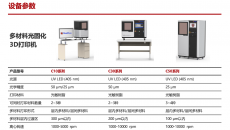
南科大技術(shù)孵化,,深圳質(zhì)多三維推出多材料光
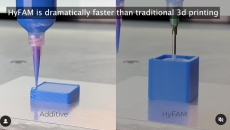
約翰霍普金斯大學(xué)推出混合成型3D打印技術(shù),
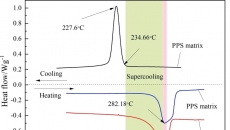
西安交通大學(xué)發(fā)表文章:利用過冷聚合物熔體

江西師范學(xué)院3D打印技術(shù)應(yīng)用專業(yè)介紹
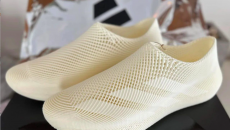
多名購買者反應(yīng)鞋面出現(xiàn)斷裂,!阿迪達斯1000

美國空軍巨額投資:Ursa Major獲得2.06億合

關(guān)注南極熊

通知
聯(lián)系QQ/微信9:00-16:00
392908259南極熊3D打印網(wǎng)
致力于推動3D打印產(chǎn)業(yè)發(fā)展

 收藏
收藏 轉(zhuǎn)播
轉(zhuǎn)播 支持
支持 反對
反對
 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351