��Դ���߷��ӿƌW(xu��)ǰ��
�S���˹����ܼ��g(sh��)���M(j��n)�������ܙC(j��)���ˮa(ch��n)�I(y��)����S����l(f��)չ�����H�ϣ����C(j��)���ˡ�һ�~������F(xi��n)��1921�꿨�נ��������(KarelCapek)��(chu��ng)����һ���ƻÄ��С�
Ŀǰ�����(sh��)�C(j��)���ˣ��oՓ���С��ͨ������ͨ�^һϵ�Џ�(f��)�s�����첽�E��(g��u)���ģ��@Щ���E������֫�w����Ӻ���Դ�M�����c���ṩ��ͬ���ܵĪ�������������C(j��)������ȣ��ö�ܳ����Ͻ���ęC(j��)���˾���һ���ă�(y��u)�ݡ���������һ�N���؏�(f��)�D���M�ɵĺϳɽY(ji��)��(g��u)��ּ�ڱ��F(xi��n)������ĺ��^���ԡ��c���ڲ��ϲ�ͬ�������ϵ��О����乤�̽Y(ji��)��(g��u)���Ƽs�������Ǽ���������Ϙ�(g��u)���(q��)�ӡ��������켼�g(sh��)����3D��ӡ���ѽ�(j��ng)�����ˏ�(f��)�s�ij����ϵ����죬��Ҏ(gu��)ģԽ��ԽС������Ҳǰ��δ�С����y(t��ng)�ϣ�����C(j��)������ه�ڽM�b�xɢ�Ĉ�(zh��)��������������̎�������Դ���C(j��)���˳�����ͨ�^�ڳ����ϵ������ԽY(ji��)��(g��u)�И�(g��u)˼�����ԁ�����(zh��n)�@�Nģʽ��
�Ěvʷ�Ͽ��������ϵ��о���Ҫ�����ڹ�W(xu��)��(y��ng)���ϣ�������г�����ͨ�R�ͷ����R�����Ŀ��{(di��o)�C��W(xu��)���Եij����ϡ�Ȼ������������о��ˆTԽ��Խ����D(zhu��n)���������I(l��ng)������@�N�O(sh��)Ӌԭ��������o��ʹ�Â����X݆���Ɍ������\���D(zhu��n)�Q�����D(zhu��n)�ęC(j��)е�����ϣ����܉����{(di��o)�����Ȼ�׃�ε��w�e���Ե��Ƕ�C(j��)����Ⱥ����(chu��ng)��C(j��)���˳����ϵ���һ�l;�����ڽY(ji��)��(g��u)���w�F(xi��n)���C(j��)�����΄�(w��)�������磬�˂������O(sh��)Ӌһ�N�����ϣ���׃�ο���ͨ�^���̖�M(j��n)�п��ơ�
�b�ڴˣ�����һ�ڡ�Science���ڿ��ھ��l(f��)���˼��ݴ�W(xu��)��ɼ����У����С����ڈF(tu��n)꠵��³ɹ���ԓ�F(tu��n)��_�l(f��)��һ�N�µ��O(sh��)Ӌ���Ժ� 3D ��ӡ���g(sh��)������һ����(g��u)���C(j��)���ˡ���һ���ߞ���A����

640.png (151.02 KB, ���d��(sh��): 75)
���d����
2022-6-28 08:45 �ς�
���w���ԣ������_�l(f��)��һ�N�����O(sh��)Ӌ��늳����ϵķ�����ԓ�����ɟoԴ�������Դ�͌�(d��o)���M�ɣ����Ԉ�(zh��)��һЩ�C(j��)�����΄�(w��)��Figure1���������׃��ģʽ������Ť�������ƞ�һЩͨ�^�Y(ji��)��(g��u)���xɢƽ����\�ӡ����^�����@Щƽ������S�\�ӌ���֪�Y(ji��)��(g��u)�ࡢ������늘O��(y��ng)����ډ�늳����σ�(n��i)�M���Ԯa(ch��n)��Ŀ��(bi��o)�\�ӡ��ڽ�(j��ng)��ď�����Փ�У����Բ��ϵ�׃�������졢���s�ͼ��О��������������ߑ�(y��ng)�����O���ԣ�ͨ�^��ƽ��֮�ϽY(ji��)�����D(zhu��n)��U(ku��)չ��(j��ng)�䏗�ԡ��@�N�����܉��ȫ����u����늳����ϵĺ��^��Û�����С�Ť���͏��������Y(ji��)��(g��u)���O����ʩ�ӵ�늈���
640-1.png (494.38 KB, ���d��(sh��): 83)
���d����
2022-6-28 08:45 �ς�
��ʾ��D
����O(sh��)Ӌ
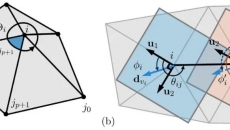
�ܘ�(g��u)���ϵĺ��ĸ������� 3D ��Ԫ��?f��)��в������Ƶط��ò��ϣ��@�^��Ȼ���w���е����ƻ�ģ�������Ԍ��F(xi��n)��������ԡ���ˣ�����������һ�N�����ҏ�(qi��ng)��IJ��ԁ혋(g��u)�� 3D ���g�еĉ�늻��ԡ���(d��o)늺ͽY(ji��)��(g��u)�ࣨ�D 1A�������F(xi��n)�еĉ�늏����������������е����ɶȣ������� Cosserat ���w�Ļ��A(ch��)�϶��x�ˏV�x��늏����������ܘ�(g��u)��늲��ϵđ�(y��ng)׃�D(zhu��n)�Q���D 1B�����Y(ji��)��(g��u)�ľ��w�Y(ji��)��(g��u)����������D1C-1K��ʾ��
640.jpeg (250.82 KB, ���d��(sh��): 64)
���d����
2022-6-28 08:45 �ς�
���D 1. �������⑪(y��ng)׃ģʽ�ęC(j��)���˳����ϵĺ����O(sh��)Ӌ
�C(j��)���˳����ϵ���������
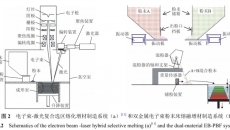
�����_�l(f��)��һ�N늺ɳ�������������켼�g(sh��)���܉�?q��)���늻����ࡢ�Y(ji��)��(g��u)��͌�(d��o)���M�b�ɏ�(f��)�s��3D�ܘ�(g��u)�����ȣ�ͨ�^�����3D��ӡϵ�y(t��ng)�����Ϻͷ�������ӡ��ؓ(f��)늺ɵĘ�֬��ؓ(f��)�d�ļ{�������z�w����D2A��ʾ��Ȼ��(d��o)����x���Եس��e�ڎ�늘�֬�ϣ��γɎ���늘O�� 3D �ܘ�(g��u)���D 2B�������⣬�����U�����ṩҺ�w�ܷ���U�h(hu��n)���������� PZT �ڸ��� 800��C �Ĝض��µ��U���l(f��)���D 2D�����@�N 3D ���췽�����S������о��_���߶� 3D �Y(ji��)��(g��u)�͵Ϳ�϶�ʵĉ�늻��Բ��ϣ��D 2E-2H������֮������ʹ�þ��п��g�����o늺ɵĶ�������w���ϵ�y(t��ng)�������x���^(q��)���������b��Ќ�(d��o)늽��ٺ͉�����Ե�3D�մɾ���
640-3.jpeg (211.65 KB, ���d��(sh��): 64)
���d����
2022-6-28 08:45 �ς�
���D 2. ���������ƽ�_
�����ɶȷŴ�ͳ���(y��ng)׃
����������ęC(j��)���˳����Ͽ���ʹ��늈����C(j��)е��(y��ng)׃���p���D(zhu��n)�Q���a(ch��n)���\�Ӻ͂��С��扺�Ч��(y��ng)�x��C(j��)�����(q��)����������ֱ�Ӻ��p���Ч��(y��ng)�քeͨ�^���w���ܣ����ұO(ji��n)�y��������ܣ����|�z�y���b�У����F(xi��n)�������ơ������ϵ���?f��)�Y(ji��)��(g��u)���S��늘Oֱ�ӷ����ډ�늻���֧���ϣ��Ķ��a(ch��n)������(qi��ng)��늈����Ŵ��(q��)�ӑ�(y��ng)׃��
640-2.jpeg (181.64 KB, ���d��(sh��): 67)
���d����
2022-6-28 08:45 �ς�
���D 3. �C(j��)���˳������O(sh��)Ӌ�Č����C
ͬ�r����������،��(q��)�Ӻ�֪������һ���p�ɵ��͏�(f��)��3D�����У�ԓ���ӿ�����̎�ƄӲ���֪�܇��h(hu��n)����Ȼ������ͨ�^�O(sh��)Ӌ���d����ϵ�y(t��ng)���Դ�������������`�Č�ʩ�~����һ�����@�Nϵ�y(t��ng)�������mȻ����Ҋ�������Գ���ھ�F(xi��n)����������п��ٰl(f��)չ�ęC(j��)���˲��ϵ�ȫ�����������ҳ�������ȱ�c�����]���@��ӑՓ���ƄӉ�늳����ϣ���늻���Ԫ���IJ�����Ȼ������(qi��ng)�����Ե��������أ������书�ʺͷ�ɢ������Ȼ����Ҫ�˷����ϵK���M�ܴ����@Щ���ƣ��������C������(d��ng)�Ƅ��ԺͲ��ܼs���������Բ��DZ���ĕr��һ�K��늼ܘ�(g��u)�������������������ɶȵľo����3D��ӡ�C(j��)е�֣����܉������������Sƽ�Ʋ����@���������S���D(zhu��n)��
640-1.jpeg (164.51 KB, ���d��(sh��): 70)
���d����
2022-6-28 08:45 �ς�
���D 4. �̼�푑�(y��ng)��ģʽ�Ƅ��͙C(j��)����
��������֪����(d��o)���C(j��)����
���ߺ���
640.png (149.63 KB, ���d��(sh��): 59)
���d����
2022-6-28 15:09 �ς�
���ݴ�W(xu��)��ɼ����У��Xiaoyu (Rayne) Zheng�����n�}�M�����W(xu��)����W(xu��)�Ͳ��ϿƌW(xu��)�м�ȡԭ�����_�l(f��)��һ���������죨3D��ӡ����ˇ�������O(sh��)Ӌ�ͺϳɷ������Ԅ�(chu��ng)����пɿ���?f��)�Y(ji��)��(g��u)���ɷֺͶ�߶������Ķ�ܲ��Ϻ�һ�wʽ�O(sh��)�䡣ԓ�n�}�M�e�O�،��@Щ�����D(zhu��n)�Ƶ���ӡ��Y(ji��)��(g��u)���C(j��)���ˡ���Դ����͂���(d��o)��������ͱ����ďV����(y��ng)���С�Xiaoyu (Rayne) Zheng�����n�}�M�ڳ��p������(qi��ng)�͏��Բ��ϵĿɔU(ku��)չ�������췽������Ĺ���������ʡ�����Ƽ��uՓ����ʮ��(chu��ng)�¡����аl(f��)100���s־�����ƌW(xu��)���s־�͡���Ȼ���ϡ��ķ����������
ԭ��朽ӣ�
https://doi.org/10.1126/science.abn0090
| 








 �ղ�
�ղ� �D(zhu��n)��
�D(zhu��n)�� ֧��
֧�� ����
����
 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351