本帖最后由 可可小熊 于 2022-8-5 21:30 編輯
導讀:能夠與自然和社會環(huán)境相結(jié)合的仿生機器人大有用處,,他們可以用于生物多樣性保護、老年人的日常護理等方面,。盡管人工執(zhí)行器已經(jīng)可以做到與人類肌肉相同的收縮性能,,但仿生機器無法模擬由肌肉的復雜結(jié)構(gòu)所實現(xiàn)的運動多樣性。

微信圖片_20220803222922.png (52.13 KB, 下載次數(shù): 221)
下載附件
2022-8-3 22:45 上傳
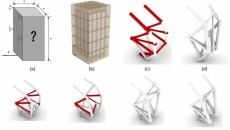
南極熊獲悉,,來自意大利理工學院(IIT) 的研究人員于2022年7月在《Science Robots》上發(fā)表了題目為《3D-printed biomimetic artificial muscles using soft actuators that contract and elongate》(《使用可收縮和拉長的軟驅(qū)動器的3D打印仿生物人工肌肉》)的研究,,研究人員設計制造了一種“氣動人工肌肉”,名為GRACE,。GRACEs不需要任何限制應變的元件,,它們可以通過設計來收縮和伸展,并且可以在不同的尺寸尺度上,、用不同的材料和機械性能來實現(xiàn),,從而實現(xiàn)廣泛的逼真的運動。GRACEs可以通過低成本的增材制造來制造,,甚至可以直接建立在功能設備中,,例如一個完全三維打印的氣動人工手,只需一步就可以完成,。這使得基于氣動人工肌肉的設備的原型設計和制造更快,、更直接。
微信圖片_20220803225047.png (403.78 KB, 下載次數(shù): 255)
下載附件
2022-8-3 22:50 上傳
△基于GeometRy的執(zhí)行器提供動力
如上圖所示的手部運動就是由基于GeometRy的執(zhí)行器提供動力的,,這些執(zhí)行器可以收縮和拉長,由樹脂3D打印制造,,它們能夠像肌肉一樣伸展和收縮,。而且這些制動器僅重8克,卻可以舉起高達自身重量 1,000 倍的重,。
研究團隊使用Formlabs Form 3 3D打印機3D打印他們的GRACE,,還允許研究人員將褶皺集成到設備的可折疊和展開的膜中,從而為它們提供承受反復變形所需的柔韌性和強度,。在實踐中,,該團隊已經(jīng)使用它們單獨和成組地舉起越來越重的物品測試了執(zhí)行器的能力 當集成到機器人手中時,它們能夠幫助實現(xiàn)彎曲手指,、扭轉(zhuǎn)手掌和轉(zhuǎn)動手腕的運動,。通過有效地結(jié)合這些方法,IIT 團隊表示可以 3D 打印足夠強大和靈活的軟執(zhí)行器,以有效地“與自然和社會環(huán)境相結(jié)合”,。因此,,該團隊認為他們的機器人手原型是實現(xiàn)放生設備的第一步。
微信圖片_20220803224047.png (329.49 KB, 下載次數(shù): 242)
下載附件
2022-8-3 22:46 上傳
微信圖片_20220803224042.png (345.66 KB, 下載次數(shù): 231)
下載附件
2022-8-3 22:46 上傳
微信圖片_20220803224051.png (386.7 KB, 下載次數(shù): 238)
下載附件
2022-8-3 22:46 上傳
△IIT 研究人員的機械手配有 3D 打印的 GRACE 執(zhí)行器,。圖片來自 IIT,。
Screenshot-2022-08-03-at-11.42.59.png (941.27 KB, 下載次數(shù): 268)
下載附件
2022-8-3 22:50 上傳
△從 FEM 模擬中獲得的 GRACE 應變分布結(jié)果。圖片來自 IIT,。
Screenshot-2022-08-03-at-11.38.11.png (616.42 KB, 下載次數(shù): 271)
下載附件
2022-8-3 22:50 上傳
△團隊的光彈性測試裝置,。圖片來自 IIT。
基于 3D 打印的生物模擬
自然界為材料科學家和工程師提供靈感,,為了在人造結(jié)構(gòu)和機器人技術(shù)中重現(xiàn)這些特性,,研究人員經(jīng)常使用3D打印,開拓仿生學的發(fā)展,。
●在浙江大學,,科學家們開發(fā)了3D 打印的墨魚啟發(fā)結(jié)構(gòu),模仿了海洋生物獨特的能量吸收能力,。該團隊的早期模型非常耐壓縮,,能夠承受高達自身重量 20,000 倍的變形。
●國立臺灣科技大學的工程師擁有不需要任何支撐材料 的 FDM 3D 打印海膽殼形格子,。
●在仿生軟機器人的嘗試中,,研究人員已經(jīng)部署了能夠?qū)⒛芰亢碗娦盘栟D(zhuǎn)換為運動的執(zhí)行器,以創(chuàng)造具有逼真運動的機器人,。山形大學的一個團隊提出了一個全 3D 打印的軟執(zhí)行器作為水母機器人的基礎,。
原文鏈接:
 scirobotics.abn4155.pdf
(1.71 MB, 下載次數(shù): 302)
scirobotics.abn4155.pdf
(1.71 MB, 下載次數(shù): 302)
2022-8-3 23:12 上傳
點擊文件名下載附件
|
 收藏
收藏 轉(zhuǎn)播
轉(zhuǎn)播 支持
支持 反對
反對








 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351