��Դ�� �����ӡ�c��������
�ɴ�ӡ�������쌧늏����w�ڿɴ�����Ӯa(ch��n)Ʒ��ܛ�C���˵ȷ�����ЏV韵đ���ǰ����Ȼ������Ҋ�Č�늲��ϵĄӑB(t��i)���ܺ��ٵõ��о������ڱO(ji��n)�y�ӑB(t��i)��׃����ͨ�����F(xi��n)���ѣ��O(ji��n)�y������̖ʧ�桢�Gʧ�P(gu��n)�I�������־��ȱ�c�����������Č��H���á�
���ڣ����A��W���܃x��ϵ��s���ڈF���Advanced Functional Materials�ڿ��l(f��)���}�� ��Printable and Stretchable Conductive Elastomers for Monitoring Dynamic Strain with High Fidelity�������£������һ�N���г�ɫ�ĄӑB(t��i)���ܵ�Ag-Ecoflex- PDMS�����w��EAP����Ag-Ecoflex-PDMS�����w���и�늌��ʣ��c������늲�����ȣ��@�N��늲����ڙz�y�ӑB(t��i)��׃������и�С���^�_푑������ߵđ�׃�`���Ⱥ��͵Ĝ����ԡ�ͬ�rԓ�F������һ�N������ȌW���ĄӑB(t��i)У�ʷ������ɹ���У���˂�����̖���������`���0.1%��ԓ�F�������Č�늏ͺϏ����w�c�ӑB(t��i)У�ʷ��������w�ӑB(t��i)��ӱO(ji��n)�y���˙C�f(xi��)����̓�M�F(xi��n)���ȑ�����չ�F(xi��n)����ă�(y��u)�ݺ͝�����
������B
�����쌧늏����w�������ɴ�������O�䡢ܛ�C���˺�ֲ��ʽ�t(y��)���O��Ŀ����������������쌧�w��ͨ����������Č�늏����w��������������ϵČ�늻��Բ��ϡ���늻��Բ���ͨ���ǹ��Ќ�늲��ϻ���ͨ�^������w��/���c�ۺ����϶��γɡ��S���о��ˆT�ѽ�(j��ng)�_�l(f��)�˶�N�������b�ã�ͨ�^ʹ�ù�̼��g(sh��)���D(zhu��n)�Ƽ��g(sh��)�����ӡ���g(sh��)����늻��Բ����b�䵽�����w�����ϡ����У���ӡ���g(sh��)�����������ɱ������a(ch��n)Ч�ʳɞ�һ�N���������ķ�ʽ��
���ڌ��ɴ�ӡ��늲��ϵ��о�����늏����w�Č���ԡ���׃�����Ժ������Զ������@���ĸ��ơ��mȻʹ�û��ڌ���w��/�����Č�늏����w�đ�׃�������ѱ��V����������@Щ��׃�������ĄӑB(t��i)���ܺ��ٵõ��о��������(sh��)�о�ֻ�漰��늏����w��О�Ĝ��o�B(t��i)���|(zh��)���������о��P(gu��n)ע��׃�������ڱO(ji��n)�ӑB(t��i)�\�ӕr����̖����ȣ�����F(xi��n)�������е����w/֫�w�\�ӻ��ք��\�ӡ��ڱO(ji��n)�y�@Щ�ӑB(t��i)�\�ӕr��ʹ�Ì�늲��ϵđ�׃������ͨ����������̖ʧ�憖�}����׃�Мy������˽��ͣ����F(xi��n)���^�_푑����`���Ƚ��͡��dž��{(di��o)�Мy���Եȡ���̖ʧ�憖�}�V�������ڴ����(sh��)�ӑB(t��i)��׃���нY(ji��)���У��������ò�����ҕ�����ڌ��H�����У���׃����������̖���������̓�M�F(xi��n)���ؽ���������̖�O(ji��n)�ء�������o������-�C���˽����ȶ�ܱO(ji��n)���΄��зdz���Ҫ��
��ˣ����о������һ�N�µľ��и߱������ܵĄӑB(t��i)��׃���еĹ��ܲ��ϡ�ԓ�F�ͨ�^��PDMS�����ϴ�ӡ���y��������Ecoflex���īˮ���õ�����Ag-Ecoflex-PDMS�Č�늏����w��Ag-Ecoflex-PDMS�ڄӑB(t��i)��׃�±��F(xi��n)����(y��u)���đ�׃�������ܣ��w�F(xi��n)���С���^�_�����ߵđ�׃�`���Ⱥ��͵Ĝ���ԓ�о�ͨ�^ʹ�û�����ȌW����У�ʷ������Mһ��У��Ag-Ecoflex-PDMS�đ�׃푑���ʹ�t���`������� 0.1%�ԃ�(n��i)������Ag-Ecoflex-PDMS�đ�׃�����������ڸ߱���رO(ji��n)�y���w֫�w�ĄӑB(t��i)�\�Ӳ����F(xi��n)���˙C�f(xi��)ͬ��ƹ����չʾ��������Č�늏ͺϏ����w�ڱO(ji��n)�y���w�ӑB(t��i)��ӡ��˙C�f(xi��)ͬ��̓�M�F(xi��n)���ȑ����еă�(y��u)Խ�Ժ͏V�ǰ����
����^��
1.��늏����w�ĽM���c�����е������
�����쌧늏����w������ӡ�ھۺ�������ϵČ�늱�Ĥ�����У���늱�Ĥ�Ɍ���w���͏����w���w�M�ɡ�����w�������ɢ�ڏ����w���w���γɌ�늾W(w��ng)�j���������ጷ��^���У�����w���S�ۺ�����ĵđ�׃���Ƅӣ�����늏����w���푑����D1cչʾ�˴����(sh��)��ӡ��늏����w�ڄӑB(t��i)����ጷ�ѭ�h(hu��n)���g�Ĵ������푑�ģ�͡�������ĵ�һ�A�Σ��D1d��I�����������췽�v����늏����w�����쑪���®a(ch��n)������x�Č���w�����Ķ��p���ˌ���w���Ľ��|�����ӌ�늽Y(ji��)����늏����w�еČ��ͨ·�pС����ˌ���w���W(w��ng)�j������������ӡ�������ĵڶ��A�Σ��D1d��II���������ڏ����w�ęM����׃�Σ������µČ�늏����wҲ���ܙM��ĉ���������������ڙM���Ͼo�ܾۼ����@�����ˌ�����ӵĽ��|�����ӌ�늽Y(ji��)�����ͨ·�������ӣ���ˌ�����ӾW(w��ng)�j�����pС��������Č�늏����w��ጷŕr���t���l(f��)���෴�ĄӑB(t��i)�О顣

640-1.png (156.51 KB, ���d��(sh��): 104)
���d����
2022-8-22 09:38 �ς�
�D1 �����쌧늏����w���䌦�ӑB(t��i)�����ጷŵ��푑�
2.��늏����wEAP�c������ȌW���ĄӑB(t��i)У��
���ͨ·�ؙM��Ϳv��IJ��f(xi��)�{(di��o)�ĄӑB(t��i)�О飬�_�y�ˌ�늏����w����׃�̼��ĄӑB(t��i)푑����Ķ�������ጷ������Юa(ch��n)���^�_������塣�����ص��ǣ��M��Ϳv��?q��)�늸������܌��·dž��{(di��o)��׃���к��`���Ƚ��ͣ��D2c��d���������쌧늏����w���@Щ�^�������W���܇����������������鑪׃�������Č��H���á�
640-1.png (361.49 KB, ���d��(sh��): 100)
���d����
2022-8-22 09:39 �ς�
�D2 ���īˮ���y������72.0%�r��ͬ���Ŀ����쌧늏����w�������ጷŕr�đ�׃����푑�
������ߑ�׃�����������ܣ�ԓ�о������һ�N����EAP�Č�늏����w��ԓ�Fꠌ��yƬ���Ϻ�Ecoflex���|(zh��)��EAīˮ���M�ɵČ�늱�Ĥ(100um��)��ӡ��PDMS���ף�1mm���ϣ��õ���EAP����PDMS������Q��Ecoflex���ׄt�õ���EAE��ԓ�F�ͬ���O(ji��n)�yEAE��EAP������ጷ�ѭ�h(hu��n)������40%��׃���е����푑��Ա��^�����đ�׃�������ܡ����Y(ji��)����D2a��ʾ��EAE�ĄӑB(t��i)푑��д������@�ļ�壬Ȼ������EAP�ķ����У���������EAP���M��һ��ԭ����EAE�ęM����׃�α�EAP�ęM����׃�θ����ң��D2b����EAP��(y��u)��EAE����һ��ԭ���ǣ��cPDMS��ȣ����錧�īˮ��(li��n)����Ecoflex���|(zh��)���������^�͵ė���ģ��������������K���īˮ�ĉ��s׃�Σ��Ķ����ƌ��ͨ·�ؙM��Ϳv����\�ӌWͬ�����D2c�@ʾ��EAE�������ጷ��^���е��������׃��(10�C40%��׃)�����Կ����������F(xi��n)�������ጷń����С������ڄӑB(t��i)��׃�¿v��͙M��?q��)��ͨ·���Ɖĺ��ؽ�֮�g�ĸ�����EAE���H�ӑB(t��i)�푑�׃����ґ�׃�����Ա��������D2d�@ʾ��EAE�Ĝ������ԣ���������������`���_��20.1%������EAE����葪׃�Мy��80%�đ�׃������(n��i)���F(xi��n)���dž��{(di��o)�ԡ����֮�£�EAP���F(xi��n)�����õđ�׃�������ܣ��w�F(xi��n)����С���^�_���ߵ��`���ȣ������������õĿ��؏��ԣ��ڙz�y�ӑB(t��i)��׃��������Ѓ�(y��u)�ݡ�
�����Mһ�����������`�ԓ�F������һ�N������ȌW���ĄӑB(t��i)У�ʣ���У��EAP�����w�đ�׃������̖�����]��������늏����w�������ጷ��µ�늄����W��ԓ�F������һ�N�ӑB(t��i)У�ʷ����������dz�Ҏ(gu��)���o�B(t��i)У�ʣ�ͨ�^����ģ�͵�У�����a����׃����ԓ�F�ʹ����ȌW����(j��ng)�W(w��ng)�j��������늏����w�ڄӑB(t��i)��׃�µ��푑����Ķ��܉����(j��)��׃�������ĄӑB(t��i)푑��A�y�y���đ�׃������EAP��׃�������������õČW���L�����P(gu��n)�Ե�������ԓ�F꠲����L����ӛ��(LSTM)�W(w��ng)�j������ӑB(t��i)У��ģ�͡���D2g��ʾ���鑪׃����������40%��׃������ጷ�ѭ�h(hu��n)�Ĝy���Y(ji��)������׃��������ԭʼ���ݔ���Ա��F(xi��n)��С���^�_���t����ʹ�û���LSTM�W(w��ng)�j��У���M��У���������������ݔ���D(zhu��n)�Q��y���đ�׃���õ���׃�c���H��׃��һ�£������^�_���t���`��������������y��׃�c���H��׃֮�g�ľ������`���_��0.22%�����⣬���Mһ����C��ԓ��������Ч�ԣ�ԓ�F�߀�M���˷ֲ�����/�½���׃ԇ�Ɍ��Y(ji��)��2h���Կ�������������У��ݔ���cʩ���ڂ������ϵČ��H��׃��ȫ����ͬ�����y���đ�׃�c���H��׃֮�g�ľ������`���0.84%��ͨ�^ʹ�û�����ȌW����У�ʣ���׃�������Ĝ����`�����ȫ����������14.4%���͵�0.1%��
3.��늏����w�Č����
����ʹ�Ì�늏ͺϲ����M�Б�׃�Мy֮�⣬ԓ�F��о��˴�ӡ�ڲ�ͬ�ۺ�������ϵČ��īˮ�Č���ԣ��l(f��)�F(xi��n)��PDMS����Č�늲��Ͼ�����ߵČ���ԡ�ԓ�F��Ƃ���EAīˮ(�����yƬ���Ϻ�Ecoflex���|(zh��))��PAīˮ(�����yƬ���Ϻ�PDMS���|(zh��))�����քe��������ӡ��Ecoflex��PDMS����������(PI)���X(Al)���ط�¡�Ͳ����IJ�ͬ�����ϡ����Y(ji��)����D3a��ʾ����ӡ��PDMS�����ϵ�EAīˮ��PAīˮ��늌����_�����ֵ������ӡ���������ϵČ��īˮ��늌��ʽӽ����㡣��D3b��ԓ�F�ͨ�^�����īˮ��ӡ�ڽ��|�治ͬ�Ļ������Ƃ䲻ͬ�ĵČ�늏����w������PDMS�����EAP��EAEP��늌��ʣ��քe��4527 S cm-1��5110 S cm-1���h����EAE��EAPE���քe��111 S cm-1��275 S cm-1����������늏����w�Č������������������īˮĤ�µĽ��|���ϛQ���ġ�
���˽��������늙C����ԓ�F��O��ͬ�Ļ����ڌ��īˮ�ğ�̻��^���о��в�ͬ����Û���տs�О飬�@���܌�������ڌ��īˮ�е��y��Ƭ�IJ�ͬ�ԽM�b��������C�@һ���O��ԓ�F꠷քe�O(ji��n)�y�������N���壨Ecoflex��PDMS��PI���ϵ�EA��Ĥ�����̻��^���е���Û���ʡ����Y(ji��)����D3c��ʾ��PDMS��Ecoflex�����ϵ�EA��Ĥ���S�ض�������u��Û��������s�^�����տs��ԭʼ���ȣ��@ʹ��δ�̻����yƬ�o�ܾۼ��M�о������ԽM�b���Ķ��a(ch��n)���˸���Ľ��|�����ӌ�늽Y(ji��)����ˣ�PDMS�����ڹ̻��^�̵������A�εğ���Û���տs���M��Ag��Ƭ���ԽM�b������������ߌ�늏����w�Č���ԡ����w���ԣ� EAP���иߌ���ԣ����õ��������c����W���ܣ����Գɞ��ɫ�Ŀ����쌧�w�Ϳ������������
640-4.png (112.97 KB, ���d��(sh��): 102)
���d����
2022-8-22 09:38 �ς�
�D3 ��늏����w��늌���
4.Ag-Ecoflex-PDMS��늏����w�đ���
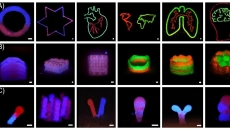
������C�������EAP�Ĺ��ܣ�ԓ�F�ͨ�^��PDMS����״�ӡEA��Ĥ�����쑪׃����������D4b���c��ӡ��PDMS�����ϵĆθ�������ȣ�ԓ����������׃���F(xi��n)���@�������푑������������F(xi��n)���^С�������^�͵đ�׃푑����@�������в�ͬ�y������EAP�����w���Կɿص������ɞ邀�Ի��Ŀ����쑪׃�������Ϳ����쌧�w��
640-5.png (100.35 KB, ���d��(sh��): 112)
���d����
2022-8-22 09:38 �ς�
�D4 ʹ��������Ŀ����쌧늏����w�ĄӑB(t��i)�O(ji��n)�y����
ԓ�F��ú����y������72.0%��EA��Ĥ��EAP�����w�_�l(f��)�˿����쑪׃���������Á��O(ji��n)�������ߺ��ܲ����g��ϥ�w�\�ӡ���ԇ���Բ�ͬ�ٶȣ�4��6��8 km h-1�����ߺ��ܲ��r�IJ������l����D4d��ʾ���D4e��ʾ���������ԇ��ϥ�w�ϵ�EAP��׃�������O(ji��n)�y����ϥ�w�\�ӣ���������B(t��i)݆���ļ���(ji��)�����_�R�e�������c��֫�w�\�Ӳ�ϵ�y(t��ng)�z�y������ԇ��ϥ�w�Č��H�P(gu��n)��(ji��)�Ƕ� (�D4f)�dz�һ�¡�ʹ��EAP�������O(ji��n)�y��ϥ�w�\�ӵ���̖����Ȍ�����ϥ���_0.955��������ϥ���_0.904��
����֮�⣬ԓ�F���EAP��׃���������F(xi��n)���˙C������ƹ������D5c��ʾ�����ⲿ���EAP��׃����������ԇ�����Ñ�׃���������r�ٿv�Cе�ۣ��C�����ֱ��c��ԇ���ֱ�ͬ���\�Ӳ��ɹ��ؽ�ס���ͻ���ƹ�������ϽY(ji��)��������ԓ�о��������EAP��늏����w�܉�����˙C�f(xi��)����ͬ���\�ӵľ������ơ�
640-6.png (296.64 KB, ���d��(sh��): 114)
���d����
2022-8-22 09:38 �ς�
�D5 ʹ��������ĵĿ����쌧늏����w���˙C�f(xi��)������
���Y(ji��)�cչ��
ԓ�о�����̽ӑ�˿����쌧늏����w�ڱO(ji��n)�y�ӑB(t��i)��׃�е���̖ʧ�憖�}�������Ag-Ecoflex-PDMS��늏����w������Ч�����ƌ�늻��Բ����Ќ��ͨ·�ؙM��Ϳv��IJ��f(xi��)�{(di��o)�ӑB(t��i)�О飬�Ķ��@��С�^�_���`���ȡ�ͬ�rԓ�F��C����������Č�늏����w�đ�׃�������ͨ�^��ȌW���ӑB(t��i)�˶������õ���Ч��������������и���(y��u)�ӑB(t��i)���ܵĿ����쑪׃�������ṩ��һ�N��Ч�ķ�������һ���棬ԓ�о�߀������Ag-Ecoflex-PDMS�����w�ڌ��īˮ��̻��^��������PDMS���ğ���Û���տs�@���˸�늌��ʣ���˿������郞(y��u)���Ŀ����쌧�w������ʾ����У�Ag-Ecoflex-PDMS��늏����w���F(xi��n)���dz��ߵı���ȣ�>0.9���������܉�ʴ_���@�P(gu��n)�I�����־��ԓ�о��������Ŀ����쑪׃���������Ѓ�(y��u)���ĄӑB(t��i)�O(ji��n)�y���ܣ����Ԟ�����쌧늲����ڱO(ji��n)�y���ӣ��˙C�����ͅf(xi��)����̓�M�F(xi��n)���ȷ���Č��H�����ƽ��·��
| 










 �ղ�
�ղ� �D(zhu��n)��
�D(zhu��n)�� ֧��
֧�� ����
����
 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351