��(l��i)Դ���L(zh��ng)����G60����(li��n)��
��(d��o)�x�����������һ�N���ڵͳɱ��߄�(d��ng)�B(t��i)������HDR��ҕ�X(ju��)�������ļ���-��������Å^(q��)Ŀ��(bi��o)�^(q��)��z�y(c��)������
ժҪ
�F(xi��n)��(ch��ng)ҕ�X(ju��)��(sh��)��(j��)�ɼ���������ȡ�ͷ����Ƕ����������e��DED���|(zh��)���u(p��ng)���ij��m(x��)����(zh��n)�����������һ�N���ڵͳɱ��߄�(d��ng)�B(t��i)������HDR��ҕ�X(ju��)�������ļ���-��������Å^(q��)Ŀ��(bi��o)�^(q��)��z�y(c��)������������(sh��)�(y��n)�Y(ji��)��������ԓ�����܉��ڸ��N����ˮƽ��ˇ�l���z�y(c��)��ۙĿ��(bi��o)�^(q��)��
1.��B
�����������e��DED����һ�N�������죨AM����ˇ�����з�ĩ��ͨ�^(gu��)��������(d��o)�������ϣ���ͨ�^(gu��)�c��������������ۻ�����������o�������DED���Ҋ(ji��n)�Ľ����������칤ˇ֮һ���������a(ch��n)���ܶ������������������t���y��(sh��)�F(xi��n)��Ŀǰ����Ŭ�����õ��������������AM��ˇ�����ܺͿɿ��ԣ��Ԍ�(sh��)�F(xi��n)���I(y��)����ˇ���ã�Ŭ����Ҫ�������������|(zh��)����ˇ�؏�(f��)�ԡ�
����(j��)ASTM/ISO AM�g(sh��)�Z(y��)��(bi��o)��(zh��n)(ISO/ASTM 52900-15)����DED��һ�N�������칤ˇ�������^(gu��)���У��۽����ܱ������ۻ����ڳ��e�IJ��ϡ��������ܳ��e(DED)�cPBF��ƣ���ʹ�ü���(�����)����(l��i)�ۻ���ĩ��Ȼ������ĩԭ�ϵij��e���ۻ���ʽʹ������ͳɱ���Ч��?c��i)U(ku��)չ�������AM������
�о��ˆTʹ�ø��N���м��g(sh��)�^�쵽�ۻ������̬F(xi��n)���Ը��õ����⼤���c��������ñ�����������R(sh��)�e�^(gu��)�̲���(w��n)���ԣ��������^(gu��)�̡��ڽ���AM�У��O(ji��n)�y(c��)��������������(du��)����Դͬ�S���x�S���á���ͬ�S�����У�ҕ��(ch��ng)���T�۽����۳أ����۳��бO(ji��n)�ع�ˇ�^(q��)���x�S�������Ă�(c��)���^���^(gu��)�̣�����ҕҰ������(n��i)���и������^(gu��)�̾��^���x�S̽�y(c��)���������o�B(t��i)�ģ������ڴ�ӡһ��(g��)���e�ӵ��_(k��i)ʼ�ͽY(ji��)���r(sh��)���@��(g��u)���h(hu��n)����Ҳ�����b�ڳ��e��(d��ng)���ϣ��Ķ�������(g��)�ӳ��e֮��

640.jpeg (9.56 KB, ���d��(sh��): 142)
���d����
2022-10-8 16:03 �ς�
������ٳ��e��ˇʾ���݈D��
ݗ��������ڲ�ͬ���V������(n��i)�����Ŀəz�y(c��)�^(gu��)�����������۳؎��Π���x���w���������e���Π��Լ���϶���ѿp��ȱ�ݡ�ʹ���@�N̽�y(c��)���������ڼӹ��^(gu��)�����^���۳؎��Π��ȡ���������ڸ߹���ˮƽ�£��o(w��)�����������ٶ��c�۳��L(zh��ng)��֮�g�ľ����P(gu��n)ϵ�����d�ij��e�|(zh��)���u(p��ng)��������(c��)���ڻ����۳ء����x���w������ʹ�ø���ҕ�X(ju��)̽�y(c��)�����ɵ��w�R�D��ęC(j��)���W(xu��)��(x��)�㷨��
DED�^(gu��)��ͨ����1��30 mm/s���ٶ��\(y��n)�У���������ߴ�С��0.5��3 mm֮�g��������200��1500 W֮�g�����wȡ�Q����̎���IJ��Ϻ����ߴ�С����ˣ����ˇ�a(ch��n)�����۳^(q��)��s����ס���ˣ���(d��ng)����۽��ڼ���-��������Å^(q��)�ğ����̽�y(c��)���r(sh��)����Ҫ���ߵĿ��g�ֱ��ʡ���ֱ��ʣ���(d��ng)�B(t��i)��������푑�(y��ng)�r(sh��)�g���Ըߕr(sh��)�g�ֱ��ʲ��@���g���ݶȡ��߷ֱ��ʡ��߄�(d��ng)�B(t��i)�������l���ܵ�̽�y(c��)���ɱ�ͨ�����������s�����������������^(gu��)�̱O(ji��n)�ء����ܷ������|(zh��)�����ƺ��^(gu��)�̿��ƵĹ��I(y��)��Q�����đ�(y��ng)�á�
640-1.jpeg (45.97 KB, ���d��(sh��): 152)
���d����
2022-10-8 16:03 �ς�
��(du��)��ͬ��ݔ�������M(j��n)�����ɷַ������ǰ����(g��)��?j��n)?sh��)��(a)���w��������(b)����������(c)�R��������(d)����(g��)���w������
�����о���һ�N���ڵͳɱ��߄�(d��ng)�B(t��i)����(HDR)ҕ�X(ju��)̽�y(c��)���ļ���-��������Å^(q��)�����m��(y��ng)��ȡ���������x������(g��)������ϼӹ��^(q��)�����ą^(q��)���۳^(q��)�Ͱן��^(q��)���@�(xi��ng)��������Ҫ�������㷨�ڶ��x���dȤ�^(q��)��(y��u)���^(q��)��z�y(c��)����(sh��)������`���ԣ��Լ������о�����������ģʽ�z�y(c��)���dȤ�^(q��)��������ԡ�
�҂����о����c(di��n)�ǵͳɱ��ğ����(sh��)��(j��)�ɼ��c���M(j��n)��ҕ�X(ju��)������ȡ��Y(ji��)�ϣ��@�����ڸ��õ����⼤���c���ϵ�����á�Ŀ��(bi��o)���_(k��i)�l(f��)һ�N�����������z�y(c��)�㷨���Ԍ�(du��)���ɼ�����ϼӹ��^(q��)��ĕr(sh��)�ղ���(d��ng)�����������ď�(qi��ng)���ݶ��Լ����ڲ��χ��������ҕ��(ch��ng)�е��S�C(j��)�A�s������ď�(qi��ng)��׃�������Ľ�B�ķ�����ܼȿ����ݼ{�S�ϔ�(sh��)��(j��)����Ҳ�����ݼ{�S�┵(sh��)��(j��)�����o��һ��(g��)HDR������(g��u)��һ��(g��)��ɫ���a�ĵ؈D����D1��ʾ��ʹ�Ñ�������Ӗ(x��n)����עጔ�(sh��)��(j��)����ͬ�r(sh��)�x����dȤ�ą^(q��)������ʾ��Ŀ�ģ��x��������(g��)�^(q��)���(l��i)�_(k��i)�l(f��)����ʾ�҂������h�ķ���������������
640-2.jpeg (72.5 KB, ���d��(sh��): 164)
���d����
2022-10-8 16:03 �ς�
�D1 ����(g��)Ŀ��(bi��o)�^(q��)�����ġ��۳غͰן�����f(shu��)����ʹ��HDR���C(j��)�ļ���-��������Å^(q��)�@���ṩ��ͨ�^(gu��)���dȤ�^(q��)��Ĵ�ֱ��ˮƽ��(qi��ng)�������Լ�߅�硣ע�⣬�H��(y��ng)�Ï�(qi��ng)���ֵ�����o(w��)���ڲ��ܸ����������ӏ�(qi��ng)��Ӱ푵���r���R(sh��)�e����(g��)Ŀ��(bi��o)�^(q��)��
2.�^(q��)���ʼ���ͷ�(w��n)���Ľ��h����
��D1��ʾ������(g��)���dȤ�ą^(q��)���ġ��۳غͰן�������@�����c(di��n)���У���һ������һ���������c(di��n)λ�÷�(w��n)�������⣬��ͬһ�D�п��Կ�������(d��ng)�҂���һ��(g��)�^(q��)���Ƅ�(d��ng)����һ��(g��)�^(q��)��r(sh��)�����ȼ�(j��)�e��(hu��)�l(f��)��׃����Ȼ������D1�е�ʾ����ʾ������ÿ��(g��)�^(q��)��Ć�(g��)��(qi��ng)���ֵ���o(w��)����Ч�،�Ŀ��(bi��o)�^(q��)��˴˷��_(k��i)���c�����ć������ӷ��_(k��i)����ˣ����˙z�y(c��)�@����(g��)���dȤ�ą^(q��)�����Ȍ�(du��)ÿ��(g��)ݔ��D��ʹ�����m��(y��ng)�D���ֵ���g(sh��)���D2�@ʾ�����h�ęz�y(c��)�����Ŀ�D��
640-3.jpeg (36.97 KB, ���d��(sh��): 135)
���d����
2022-10-8 16:03 �ς�
�D2 ����ą^(q��)���ʼ���ͷ�(w��n)�����g(sh��)��D��
�����m��(y��ng)�^(q��)��IJ�ͬ����ˮƽ����D1��ʾ��ʹ�Å^(q��)�����L(zh��ng)���g(sh��)��(l��i)�z�y(c��)Core, Melt pool��Incandescent�^(q��)��M˜t,k �_(k��i)ʼ���D3�@ʾ�˔M�h�����Ŀ�D�����e���f(shu��)����
640-4.jpeg (50.23 KB, ���d��(sh��): 152)
���d����
2022-10-8 16:03 �ς�
�D3 ���h�Ļ��څ^(q��)�����L(zh��ng)�ęz�y(c��)���g(sh��)�Ŀ�D��
3.���m��(y��ng)�����(y��n)�C����
3.1.��(sh��)�(y��n)�b�ú�����Ӌ(j��)��
��(sh��)�(y��n)ʹ�ÙC(j��)����DEDϵ�y(t��ng)��DM3D-DMD IC106���M(j��n)�У���D4��ʾ���C(j��)����ϵ�y(t��ng)��ABB IRB140��https://new.abb.com)��������(g��)�S�����Ǟ鱾���еČ�(sh��)�(y��n)��(chu��ng)���Ē���·���H��Խ2D���e·����ĩ�ˈ�(zh��)��������(d��o)2 kW�űP��������TRUMPF TruDisk 2000��https://www.trumpf.com)���ٷ�ĩͬ�Sͨ�^(gu��)���졣
640-5.jpeg (97.26 KB, ���d��(sh��): 149)
���d����
2022-10-8 16:03 �ς�
�D4 ���C(j��)е�ֵ�DED�C(j��)����
ʹ�ò��P䓣�SS316L����ĩ�M(j��n)�Іξ����e���ڱ������ı����£���(du��)���x�S�y(c��)�����O(sh��)Ӌ(j��)��һ��(g��)֧�ܣ����ڌ����C(j��)���b�ڙC(j��)����ĩ�ˈ�(zh��)�����ϣ���D5��ʾ��֧�����S�M(j��n)���{(di��o)�����Ա��Բ�ͬ��ҕ�ǡ��ǶȺ������x�鿴�۳ء���(du��)��Ŀǰ�Ĺ��������C(j��)���b�ڒ���·������ҕ�D�У��۳�λ��ҕҰ�����ġ�
640-6.jpeg (65.7 KB, ���d��(sh��): 174)
���d����
2022-10-8 16:03 �ς�
�D5 ���b��DED�C(j��)����ϵ�y(t��ng)�ϵ�ҕ�X(ju��)ϵ�y(t��ng)�����b֧�ܿ����m��(y��ng)��ͬ�Ľ��ࡢ����(du��)�ڴ�ֱƽ���ҕ�Ǻ�����(du��)�ڳ��e·����ҕ�ǡ�
���������_(k��i)�l(f��)���㷨ּ���ƏV���ڴ���۳�?c��i)?sh��)��(j��)����ʹ���@�N�ͳɱ����C(j��)���뷨�nj���HDR�D������ȡ�ą^(q��)��ijߴ��ڸ��N�ۻ�ģʽ�����l�����P(gu��n)(li��n)����(l��i)��
640-7.jpeg (63.34 KB, ���d��(sh��): 147)
���d����
2022-10-8 16:03 �ς�
��Ʒ��SR��T�D��a�Cc���@ʾ����ұ���о����gС��ģʽ�����ۻ��^(gu��)�����γɵĿ�϶��d�����D��a���@ʾ�����S��϶�ֲ���ÿ��(g��)��϶�@ʾ����ɫ���D��b���@ʾ�˘�Ʒ�ؼ���܉�E����(g��)λ�õ�һϵ��2D�M���档����ǻ�IJ���ȫ�����ڼ�����β�E�����¿ն����磨a��-��c����ʾ��
3.2���e���
����݆���x��ݔ���dz��e�ĸ߶ȈD����D6��ʾ���_(k��i)�l(f��)��һ�N�㷨��(l��i)��ȡÿ��(g��)���e�M����Ď����������Ⱥ߶ȡ���������ճ���w���������������ʹ�ô��ڴ�С��10���Ƅ�(d��ng)ƽ���V������(du��)��y�S�xɢλ�õ�ÿ��(g��)���e�M�����M(j��n)���^(gu��)�V���ڈD7�У���ɫ��(sh��)���ͳ�ɫ̓���քe�@ʾԭʼ��(sh��)��(j��)���^(gu��)�V��(sh��)��(j��)�����e���挧(d��o)��(sh��)�����ֵ����Сֵ�������e߅��̎�Ķ��£��@Щ�Ǿ��Բ�ֵ�ģ��@ʾ��Gɫ̓�����r�Ͳ�ֵ���Ľ��c(di��n)�Q���˳��e���ϵČ���߅�硣���e����ĸ߶ȱ�ҕ����e����߅��֮�g���c(di��n)̎�ĸ߶�ֵ��
640-8.jpeg (45.1 KB, ���d��(sh��): 144)
���d����
2022-10-8 16:03 �ς�
�D6 ����݆���x����ij��e�c(di��n)�ƣ��߶ȣ���(sh��)��(j��)��
640-9.jpeg (58.71 KB, ���d��(sh��): 161)
���d����
2022-10-8 16:03 �ς�
�D7 ��ԭʼ����݆���x��(sh��)��(j��)����ȡ�������G����ʾ݆��߅����ֱ���M�ϡ�
���ڶ�Nԭ�o(w��)����������ȡ��ܣ����ġ��۳غͰן�?y��n)^(q��)���ж��x��ҕ�X(ju��)�����ߴ��c����݆���x������֮�g�M(j��n)��ֱ�ӱ��^��ҕ�X(ju��)ϵ�y(t��ng)�z�y(c��)���ij��e�^(q��)λ��A1ƽ���ϣ��D8�����@��ÿ��(g��)�r(sh��)�g�c(di��n)��(sh��)�H�۳،��Ⱥ��L(zh��ng)�ȵĺ���(sh��)����݆���y(c��)�����z�y(c��)���Ď�����λ��A2ƽ���ϣ�Ҋ(ji��n)�D8���������˳��e���Ⱥ߶ȡ��D9 �ǔM�h��̖(h��o)ע��(c��)�����ĸ�����
640-10.jpeg (30.61 KB, ���d��(sh��): 166)
���d����
2022-10-8 16:03 �ς�
�D8 ����݆���x��HDRҕ�X(ju��)ϵ�y(t��ng)�����IJ�ͬ�۳^(q��)��
640-11.jpeg (46.75 KB, ���d��(sh��): 157)
���d����
2022-10-8 16:03 �ς�
�D9 �M�h��̖(h��o)���(zh��n)���g(sh��)�Ŀ�D��
4.��(sh��)�(y��n)�Y(ji��)���cӑՓ
4.1.����ҕ�X(ju��)�������z�y(c��)�Ķ��ԽY(ji��)��
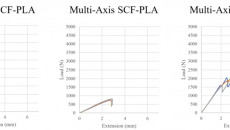
�D10�@ʾ�����傀(g��)��ͬ����ˮƽ��ӛ䛵Ĝy(c��)ԇ���еĔM�h�^(q��)��z�y(c��)�����Ęӱ����ԽY(ji��)�����������ԽY(ji��)������[52]���ҵ���
640-12.jpeg (122.8 KB, ���d��(sh��): 168)
���d����
2022-10-8 16:03 �ς�
�D10 �y(c��)ԇ��(sh��)��(j��)���ϔM�h�����Ęӱ����ԽY(ji��)�������а�ɫ���Gɫ�ͼtɫ�E�A�քe��ʾ�rо���۳غͰן�?y��n)^(q��)��TP��FP�քe��ʾ���(y��ng)�Ժͼ��(y��ng)�ԙz�y(c��)�������^�쵽��������ķ����܉��ڸ��ߵĹ���ˮƽ�p�ٸ������^(q��)��(du��)�z�y(c��)Ŀ��(bi��o)�^(q��)���Ӱ푡�
һ���(l��i)�f(shu��)���҂�ע������^�ߵĹ���ˮƽ�£����ܕ�(hu��)�и���ć�����ɔ_Ŀ��(bi��o)�^(q��)����˙z�y(c��)���dȤ�^(q��)����΄�(w��)׃�ø�������(zh��n)�ԡ��҂�����ķ����܉����^����ˮƽ�ºܺõؙz�y(c��)������(g��)Ŀ��(bi��o)�^(q��)�M�����^�߹���ˮƽ�´����ړ����^���������l������ԓ������Ȼ���ַ�(w��n)����
4.2.����ҕ�X(ju��)�������z�y(c��)�Ķ����Y(ji��)��
�����о�ʹ��������ą^(q��)�����L(zh��ng)������(du��)�z�y(c��)���ܵ�Ӱ푣���(du��)�z�y(c��)�����M(j��n)�����u(p��ng)���������Ѕ^(q��)�����L(zh��ng)�͟o(w��)�^(q��)�����L(zh��ng)����˟o(w��)�^(q��)�����L(zh��ng)��ζ��ֻʹ���˅^(q��)���ʼ���ͷ�(w��n)�����g(sh��)��
�D11�@ʾ�˸���(j��)ƽ��TPR��ƽ���ٶ�3(ÿ�뎬��(sh��))�����Ѕ^(q��)�����L(zh��ng)�͟o(w��)�^(q��)�����L(zh��ng)����r�£�����z�y(c��)�������u(p��ng)���Y(ji��)������(du��)�ں��ą^(q��)��(CR)���^(q��)�����L(zh��ng)�ĸ��Ӄr(ji��)ֵ�����ģ�����(du��)�������^(q��)��������ą^(q��)�����L(zh��ng)�����ṩ�˸��ߵ�TPRֵ�������M(f��i)��Ӌ(j��)��r(sh��)�g�Dz��M(j��n)�Ѕ^(q��)�����L(zh��ng)�ăɱ�����ˣ���(du��)�ھ��x�����������^�h(yu��n)���д����dȤ�^(q��)��ęz�y(c��)�����]�ęz�y(c��)���������Î��^(q��)�����L(zh��ng)�ęz�y(c��)����?y��n)������ṩ���ߵęz�y(c��)���ȣ�����(du��)���^С�ą^(q��)�����^(q��)�����L(zh��ng)�ęz�y(c��)�����ṩ���ĽY(ji��)����
640-13.jpeg (65.52 KB, ���d��(sh��): 130)
���d����
2022-10-8 16:03 �ς�
�D11 �^(q��)�����L(zh��ng)�Ͳ����L(zh��ng)̽�y(c��)�������(y��ng)���ʣ�TPR���c�z�y(c��)�ٶȣ�ÿ�뎬��(sh��)�����P(gu��n)ϵ���^(q��)�����L(zh��ng)��̽�y(c��)���ٶ��^���������@�Ȳ����L(zh��ng)�^(q��)���̽�y(c��)���ṩ���ߵ�TPR��
4.3.ʹ��ҕ�X(ju��)��݆���y(c��)����(sh��)��(j��)���M(j��n)�й�ˇ�|(zh��)���u(p��ng)��
ͨ�^(gu��)����ҕ�X(ju��)��(sh��)��(j��)����ȡ�ą^(q��)���c�ü���݆���x�y(c��)���ij��e�ߴ��M(j��n)�б��^���M(j��n)�й�ˇ�|(zh��)���u(p��ng)���������M(j��n)���@�N���^���۳^(q��)��ͳ��e���ȷքe��ҕ�X(ju��)��(sh��)��(j��)�ͼ���݆���x��(sh��)��(j��)���x�Y(ji��)����D12��a����ʾ��
640-14.jpeg (120.23 KB, ���d��(sh��): 166)
���d����
2022-10-8 16:03 �ς�
�D12 ��a����ҕ�X(ju��)��(sh��)��(j��)����ȡ���۳،����c�ü���݆���x�y(c��)���ij��e���ȵı��^����b����(bi��o)��(zh��n)���۳،��Ⱥ͘�(bi��o)��(zh��n)�����e���ȵČ�(du��)�ȡ�
������(g��)���e��߀���^���۳^(q��)��Č��Ⱥͳ��e���ȡ������ص������D(zhu��n)�Q�ǻ��ڃɂ�(g��)��(sh��)��(j��)����ƽ��ֵ�M(j��n)�еġ�Ŀ�����^��ɂ�(g��)��(sh��)��(j��)��څ��(sh��)�������ԣ�����һ��(g��)��(sh��)��(j��)����ÿ��(g��)����ˮƽ����D13��ʾ��ƽ��x���P(gu��n)�Ԟ��a(b��)vg = 0.391 �� 0.069�������850 W�r(sh��)x���P(gu��n)����ߣ���ֵ = 0.546��
640-15.jpeg (181.77 KB, ���d��(sh��): 168)
���d����
2022-10-8 16:03 �ς�
�D13 ���傀(g��)��ͬ����ˮƽ�£�ӛ��A(y��)�y(c��)���e�����c�۳،��ȵĘӱ��Y(ji��)��������mm*��ʾ�s�ŏ����C(j��)�@�õ��۳،��Ⱥ�Ć�λ�L(zh��ng)�ȡ�
�M�����ڲɘ��ʡ���(sh��)��(j��)��(du��)�R�IJ��_���ԣ�ע��(c��)�ɂ�(g��)��ͬ�Ĕ�(sh��)��(j��)����ҕ�X(ju��)��݆���y(c��)�������S������(zh��n)��Ҫ��Q�����^�y(c��)�������P(gu��n)�Ժ���ϣ�������о���(c��)���ڏĻ��ڈD��Ĕ�(sh��)��(j��)���M(j��n)�����m��(y��ng)�����R(sh��)�e���D13����ּ���@ʾ����݆���y(c��)����(sh��)��(j��)����ȡ���۳�����֮�g����ȫһ���ԡ��@�(xi��ng)�����f(shu��)����������ȡ��һ��(g��)��(y��ng)�ã�չʾ�����^(gu��)�̿�����ʹ�û���ҕ�X(ju��)�Ĕ�(sh��)��(j��)���鷴���ĝ���������δ��(l��i)�Ĺ��������h�����ص�����У��(zh��n)���Գ�������@Щ�㷨�����ھ������z�y(c��)�ĝ�����
5.�Y(ji��)Փ
���������һ�N���õͳɱ�HDRҕ�X(ju��)̽�y(c��)���z�y(c��)����-��������Å^(q��)���A(y��)��Ŀ��(bi��o)�^(q��)��ķ�����
1.ԓ��ܻ���ʹ�������Ք���(zh��n)�t�����m��(y��ng)�D���ֵ�ͅ^(q��)�����L(zh��ng)���g(sh��)��ԓ�����ʹ�õą���(sh��)����ͨ�^(gu��)ֻʹ�����ޔ�(sh��)���Ď�עጵĎ���(l��i)��Q��(y��u)����(w��n)�}��(l��i)�Ԅ�(d��ng)�@�á�
2.��������������ą^(q��)��z�y(c��)���g(sh��)�Ŀɿ��ԣ�������һ�N���(zh��n)��������ҕ�X(ju��)�������@�õĜy(c��)��ֵ�c�߲ɘ��ʼ���݆���x�@�õĜy(c��)���Y(ji��)����(du��)�R��
3.��(du��)��N��ͬ����ˮƽ�²��@�������M(j��n)�еĴ�����(sh��)�(y��n)������ԓ�������������z�y(c��)Ŀ��(bi��o)�^(q��)������������@�(xi��ng)�����У����(y��ng)�ԙz�����@������90%�������(y��ng)�ԙz���ʵ���10%��
4.����Ŀ�ܱȟo(w��)�^(q��)�����L(zh��ng)�Ļ����ֵ�������@�����M(j��n)���^�쵽��ԓ�����ڙz�y(c��)���м����ˮƽ�µ����Ѕ^(q��)��r(sh��)���������������ԣ����(y��ng)���ʸ���90%����һ���棬�����ֵ�����F(xi��n)���^������ܣ��e���ڙz�y(c��)��ʧ��(w��n)����r�£�������ˮƽ�µİן�?y��n)^(q��)���۳^(q��)�����(y��ng)�ԙz�y(c��)���@���½���55.78%��
5.У��(zh��n)���ҕ�X(ju��)��݆���x��(sh��)��(j��)��ѭ��Ƶ�ȫ��ͱ���څ��(sh��)���@�Ǻ���ϣ���ģ�����Ҫʹ���A(y��)��У��(zh��n)�Č�(sh��)�(y��n)�b���M(j��n)�и��м�(x��)��δ��(l��i)�{(di��o)�飬�Ԍ�(sh��)�F(xi��n)��(sh��)�r(sh��)�^(gu��)�̱O(ji��n)�أ�������Ƴ��e�νY(ji��)��(g��u)��һ�N������
��(l��i)Դ��Adaptive vision-based detection of laser-material interaction for directed energy deposition, Additive Manufacturing, doi.org/10.1016/j.addma.2020.101468
�����īI(xi��n)��Laser based additive manufacturing in industry and academia, CIRP Annals, 66 (2) (2017), pp. 561-583; Laser cladding of aerospace materials, J. Mater. Process. Technol., 122 (1) (2002), pp. 63-68
| 









 �ղ�
�ղ� �D(zhu��n)��
�D(zhu��n)�� ֧��
֧�� ����(du��)
����(du��)
 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351