àD10 åç(sh®™)Úû(y®§n)?z®°i)£–?/div>
2.3 ”ý¡ø?j®©)?y®≠u)ªØΩY(ji®¶)π˚
Ñ”(d®∞ng)ëB(t®§i)≈‰ú (zh®≥n)÷–√Ê»~∆¨¸c(di®£n)‘∆F°¢S£¨”ã(j®¨)À„◊ÉìQæÿÍáRexp°¢Texp£∫

format-18.jpeg (45.42 KB, œ¬ðd¥Œîµ(sh®¥): 70)
œ¬ðd∏Ωº˛
2022-10-12 10:59 …œÇ˜
(8)
å¢ Ω(8)ë™(y®©ng)”√”⁄‘≠ ºÕ‚ðÜ¿™úy(c®®)¸c(di®£n)£¨µ√µΩ≈‰ú (zh®≥n)∫Û»~∆¨¿Ì’샣–Õ≈cúy(c®®)¡ø¸c(di®£n)œýå¶(du®¨)Œª◊À£¨»ÁàD11À˘ æ°£”…”⁄DED≥…–ŒôC(j®©)¿Ì÷–µƒü·◊É–Œº∞∑«Ω¸ÉÙ≥…–Œíþ√ˬ∑èΩ“é(gu®©)Ñùµ»‘≠“Ú£¨àD11a÷–¿Ì’ì»~∆¨ƒ£–Õ¸c(di®£n)‘∆∆´œÚúy(c®®)¡ø√´≈˜¸c(di®£n)‘∆“ªÇ»(c®®)£¨”ý¡ø∑÷≤ºòOûÈ≤ªæ˘°£àD11bÔ@ æ≈‰ú (zh®≥n)∫Ûƒ£–Õ¸c(di®£n)‘∆Œª”⁄√´≈˜¸c(di®£n)‘∆÷–ÈgŒª÷√°£
format-19.jpeg (198.52 KB, œ¬ðd¥Œîµ(sh®¥): 78)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
(a)≈‰ú (zh®≥n)«∞Œª◊À (b)≈‰ú (zh®≥n)∫ÛŒª◊À
àD11 ÷–√Ê≈‰ú (zh®≥n)ΩY(ji®¶)π˚
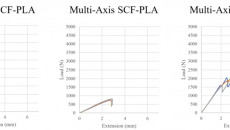
¿L÷∆”ý¡ø∑÷≤º‘∆àD(àD12)“‘∏¸÷±”^µÿ±Ìþ_(d®¢)º”π§”ý¡ø?j®©)?y®≠u)ªØΩY(ji®¶)π˚°£¡ÌÕ‚£¨Ωy(t®Øng)”ã(j®¨)≈‰å¶(du®¨)¸c(di®£n)æýÎxµƒæ˘÷µdave°¢òO÷µdmax°¢dmin≈c∑Ω≤ÓS2£¨”√”⁄∂®¡ø∑¥”≥”ý¡ø–≈œ¢°£≈‰ú (zh®≥n)«∞∫Û”ý¡øΩy(t®Øng)”ã(j®¨)ΩY(ji®¶)π˚»ÁàD13∫Õ±Ì3À˘ æ°£≈‰ú (zh®≥n)«∞∫Û”ý¡ø∑Ω≤Ó÷µ◊‘4.72¥Û∑˘∂»úp–°÷¡1.09£¨”ý¡øæ˘ÑÚ≥Ã∂»√˜Ô@÷∏þ£¨±Ì√˜¡ÀÀ˘Ã·∑Ω∑®å¶(du®¨)”ý¡ø?j®©)?y®≠u)ªØµƒÔ@÷¯–ßπ˚£ª”ý¡ø◊Ó¥Û÷µúp–°2.12 mm£¨◊Ó–°÷µ‘ˆ¥Û0.52 mm£¨’f√˜¥÷º”π§µ¿îµ(sh®¥)√˜Ô@úp…Ÿ£¨ø…÷∏þúp≤ƒº”π§–߬ £ª“Ú‘ˆ≤ƒƒ£–Õ≈c¿Ì’샣–Õ‘⁄Œª◊À◊ÉìQ«∞∫ÛÛw∑e≤ª◊É£¨π daveüo√˜Ô@◊ɪذ£¡ÌÕ‚£¨”^≤Ïúp≤ƒåç(sh®™)Úû(y®§n)–ßπ˚£¨Ωõ(j®©ng)À˘Ã·À„∑®Éû(y®≠u)ªØ∫Û±Ð√‚¡À”ý¡ø∑÷≤º≤ªæ˘ÑÚ?q®±)ß÷¬µƒúp≤ƒ”ý¡ø≤ª◊„¨F(xi®§n)œÛ£¨«“úp≤ƒº”π§’`≤Óøÿ÷∆‘⁄°¿0.03 mmÉ»(n®®i)£¨ùM◊„ π”√æ´∂»“™«Û£¨»ÁàD14À˘ æ°£æC…œÀ˘ ˆ£¨÷–√ÊÑ”(d®∞ng)ëB(t®§i)≈‰ú (zh®≥n)∑Ω∑®ƒÐÔ@÷¯Éû(y®≠u)ªØº”π§”ý¡ø°£
format-20.jpeg (12.63 KB, œ¬ðd¥Œîµ(sh®¥): 78)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
(a)÷–√Ê≈‰ú (zh®≥n)«∞ (b)÷–√Ê≈‰ú (zh®≥n)∫Û
àD12 ”ý¡ø‘∆àD
format-21.jpeg (9.33 KB, œ¬ðd¥Œîµ(sh®¥): 85)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
(a)÷–√Ê≈‰ú (zh®≥n)«∞
format-22.jpeg (56.07 KB, œ¬ðd¥Œîµ(sh®¥): 78)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
(b)÷–√Ê≈‰ú (zh®≥n)∫Û
àD13 ”ý¡ø÷±∑ΩàD
format-23.jpeg (103.88 KB, œ¬ðd¥Œîµ(sh®¥): 82)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
àD14 åç(sh®™)Úû(y®§n)–ßπ˚àD
±Ì3 ÷–√Ê≈‰ú (zh®≥n)«∞∫Û”ý¡øΩy(t®Øng)”ã(j®¨)ΩY(ji®¶)π˚
format-24.jpeg (24.96 KB, œ¬ðd¥Œîµ(sh®¥): 96)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
úp≤ƒ∫ÛÃé¿Ìµƒº”π§ïr(sh®™)Èg÷±”^Ûw¨F(xi®§n)≈‰ú (zh®≥n)–ßπ˚å¶(du®¨)º”π§–߬ µƒ”∞Ìë°£Ëb”⁄åç(sh®™)ÎHº”π§þ^≥Ã÷–—bäA°¢∂®Œª°¢ìQµ∂µ»ðo÷˙º”π§ïr(sh®™)Ègï˛(hu®¨)”∞Ìëåç(sh®™)ÎH”––ߺ”π§ïr(sh®™)ÈL(zh®£ng)µƒΩy(t®Øng)”ã(j®¨)£¨π ±æŒƒ≤…”√PowerMill∑¬’ÊÐõº˛å¶(du®¨)±»¡À∞∏¿˝”ý¡ø?j®©)?y®≠u)ªØ«∞∫Û”––ߺ”π§ïr(sh®™)ÈL(zh®£ng)(∞¸¿®þM(j®¨n)µ∂°¢ÕÀµ∂º∞„䜘º”π§ïr(sh®™)Èg)°£úp≤ƒº”π§≤…”√PowerMill»~∆¨º”π§≤þ¬‘£¨¥÷º”π§÷¡”ý¡ø2 mm£¨≤¢“‘¥÷º”π§ïr(sh®™)Èg±Ì’˜Éû(y®≠u)ªØ«∞∫Ûº”π§–߬ °£úp≤ƒº”π§Ö¢îµ(sh®¥)‘O(sh®®)÷√»Á±Ì4À˘ æ°£≈‰ú (zh®≥n)∫Ûƒ£–Õ¥÷º”π§œý±»≈‰ú (zh®≥n)«∞…Ÿº”π§É…µ¿£¨ïr(sh®™)Ègøs∂Ã64 min 10 s£¨ø…“äúp≤ƒº”π§–߬ ¥Û∑˘∂»Ã·∏þ°£
±Ì4 PowerMill„䜘¥÷º”π§∑¬’ÊÖ¢îµ(sh®¥)‘O(sh®®)÷√
format-25.jpeg (21.23 KB, œ¬ðd¥Œîµ(sh®¥): 77)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
2.4 Úû(y®§n)◊C∑÷Œˆ
2.4.1 ≤ªÕ¨ôzúy(c®®)∑Ω∞∏å¶(du®¨)”ý¡ø?j®©)?y®≠u)ªØ”∞Ìë
≤…”√2.2πù(ji®¶)œýÕ¨≤ΩÛEÉû(y®≠u)ªØ“‘≈_(t®¢i)ÎA–ßë™(y®©ng)≤®∑ÂÃéúy(c®®)¡ø¸c(di®£n)‘∆ûÈ≈‰ú (zh®≥n)å¶(du®¨)œÛµƒº”π§”ý¡ø£¨´@µ√◊ÉìQæÿÍáå¶(du®¨)±»ΩMRcon°¢Tcon£∫
format-26.jpeg (10.92 KB, œ¬ðd¥Œîµ(sh®¥): 79)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
(9)
àD15Ωo≥ˆ¡Àå¶(du®¨)ë™(y®©ng)”ý¡ø?j®©)?y®≠u)ªØΩY(ji®¶)π˚£¨àD16ûÈ≈‰ú (zh®≥n)∫Û”ý¡ø∑÷≤º‘∆àD£¨ø…“‘ø¥≥ˆ”ý¡ø∑÷≤ºœýå¶(du®¨)æ˘ÑÚ°£àD17Ωo≥ˆ¡Àå¶(du®¨)±»ΩM≈‰ú (zh®≥n)∫Û”ý¡ø÷±∑ΩàD–≈œ¢£¨≈càD13båç(sh®™)Úû(y®§n)ΩM≈‰ú (zh®≥n)ΩY(ji®¶)π˚œý±»£¨É…ΩMîµ(sh®¥)ì˛(j®¥)≥ ’˝ëB(t®§i)«˙æÄ∑÷≤º«“⁄ÖÑð(sh®¨)œýΩ¸£¨µ´å¶(du®¨)±»ΩM∆⁄Õ˚÷µ¶Ã∏¸¥Û£¨±Ì√˜¥Ê‘⁄∏¸∂ý¥Û”ý¡øÖ^(q®±)”Ú°£
format-27.jpeg (19.53 KB, œ¬ðd¥Œîµ(sh®¥): 81)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
àD15 å¶(du®¨)±»ΩM”ý¡ø?j®©)?y®≠u)ªØΩY(ji®¶)π˚
format-28.jpeg (13.84 KB, œ¬ðd¥Œîµ(sh®¥): 69)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
àD16 å¶(du®¨)±»ΩM”ý¡ø‘∆àD
format-29.jpeg (9.41 KB, œ¬ðd¥Œîµ(sh®¥): 80)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
àD17 å¶(du®¨)±»ΩM”ý¡øΩy(t®Øng)”ã(j®¨)÷±∑ΩàD
±Ì5Ô@ 棨œýå¶(du®¨)”⁄≤®π»åç(sh®™)Úû(y®§n)ΩM£¨≤®∑Âå¶(du®¨)±»ΩM”ý¡øæ˘÷µdave‘ˆ¥Û0.3 mm£¨dmax‘ˆ¥Û0.89 mm°£Ô@»ª£¨≤®π»úy(c®®)¸c(di®£n)òã(g®∞u)Ω®µƒÕ‚ðÜ¿™Ûw∑e±»≤®∑Âúy(c®®)¸c(di®£n)–°°£≤…”√≤®∑ÂÃé◊Ó¥ÛÕ‚ðÜ¿™≈‰ú (zh®≥n)£¨ø…ƒÐ‘Ï≥…≈‰ú (zh®≥n)∫Ûæ÷≤øÖ^(q®±)”Ú?q®±)çÎHº”π§”ý¡øûÈ¡„ªÚÿì(f®¥)”ý¡ø£¨åß(d®£o)÷¬√´≈˜àÛ(b®§o)èU°£¡ÌÕ‚£¨å¶(du®¨)±»ΩMS2÷µ¥Û”⁄åç(sh®™)Úû(y®§n)ΩMS2÷µ£¨’f√˜å¶(du®¨)±»ΩMúy(c®®)¸c(di®£n)”ý¡øæ˘ÑÚ–‘≤Ó°£∏˘ì˛(j®¥)åç(sh®™)ÎH≥…–Œ–ßπ˚”^úy(c®®)£¨÷∆‘ÏÕπ∆Óê»±œð(»Áæ÷≤ø§∏Ω∑€ƒ©°¢«ÚªØµ»)ºØ÷–‘⁄≤®∑ÂÃé°£‘ìÓê»±œðá¿(y®¢n)÷ÿ”∞Ìë’Êåç(sh®™)ðÜ¿™òã(g®∞u)Ω®æ´∂»£¨þM(j®¨n)∂¯”∞Ìë”ý¡ø?j®©)?y®≠u)ªØΩY(ji®¶)π˚°£àD18Ô@ æ¡ÀDED√´≈˜…œ ˆ»±œð°£”…”⁄≤®∑ÂÃéúy(c®®)¸c(di®£n)òã(g®∞u)Ω®√´≈˜Õ‚ðÜ¿™∏¸¥Û£¨π ¿Ì’ì¥÷º”π§∂ý“ªµ¿£¨ïr(sh®™)Èg‘ˆÈL(zh®£ng)31 min 28 s£¨åç(sh®™)ÎH◊ÓՂ唄䜘ÉHΩ””|≤®∑Â≈cÕπ∆Óê»±œðÃ飨¥Ê‘⁄¥Û¡øø’µ∂¬∑°£“Ú¥À£¨≤®π»Ãéòã(g®∞u)Ω®µƒΩÿ√ÊæÄ≤ªÉHƒÐæ´¥_∑¥”≥◊Ó–°Õ‚ðÜ¿™£¨«“ø…úp…Ÿ÷∆‘Ï»±œð“˝∆µƒ∑«’Êåç(sh®™)ðÜ¿™úy(c®®)¸c(di®£n)îµ(sh®¥)¡ø£¨∏¸þm”√”⁄úp≤ƒ”ý¡ø?j®©)?y®≠u)ªØ°£
±Ì5 ≤ªÕ¨‘⁄ôC(j®©)ôzúy(c®®)∑Ω∞∏”ý¡øΩy(t®Øng)”ã(j®¨)ΩY(ji®¶)π˚
format-30.jpeg (26.03 KB, œ¬ðd¥Œîµ(sh®¥): 75)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
format-31.jpeg (140.86 KB, œ¬ðd¥Œîµ(sh®¥): 76)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
àD18 º§π‚∂®œÚ≥¡∑e÷∆‘Ïæ´∂»
2.4.2 ≤ªÕ¨≈‰ú (zh®≥n)∑Ω∑®å¶(du®¨)”ý¡ø?j®©)?y®≠u)ªØµƒ”∞Ìë
ûÈþM(j®¨n)“ª≤ΩÚû(y®§n)◊C±æŒƒÀ˘Ã·”ý¡ø?j®©)?y®≠u)ªØÀ„∑®µƒú (zh®≥n)¥_–‘£¨±æπù(ji®¶)å¶(du®¨)±»GAOµ»[16]÷≥ˆµƒª˘”⁄þzǘÀ„∑®(genetic algorithm£¨GA)µƒº”π§”ý¡ø?j®©)?y®≠u)ªØ∑Ω∑®°£‘ì∑Ω∑®æC∫œøºë]¡À∂®Œª°¢æ˘ÑÚº∞Õ‚∞¸Ωj(lu®∞)‘≠Ñt£¨ƒøòÀ(bi®°o)∫Øîµ(sh®¥)Ωy(t®Øng)“ªûÈ
min fGA=alg(efix(R£¨T)+bexp(S2(R£¨T)+
cexp(1-P(D(R£¨T)
(10)
…œ Ωµ»Ãñ(h®§o)”“þÖ»˝Ìó(xi®§ng)∑÷Ñeå¶(du®¨)ë™(y®©ng)∂®Œª°¢æ˘ÑÚº∞Õ‚∞¸Ωj(lu®∞)‘≠Ñt£¨a°¢b∫ÕcûÈ¥_∂®µƒôý(qu®¢n)÷ÿœµîµ(sh®¥)°£±æŒƒ÷ÿ–¬∂®¡xôý(qu®¢n)÷ÿœµîµ(sh®¥)a=0.2°¢b=0.4°¢c=0.9£¨”ý¡ø?j®©)?y®≠u)ªØΩY(ji®¶)π˚»ÁàD19≈càD20À˘ æ°£
format-32.jpeg (143.45 KB, œ¬ðd¥Œîµ(sh®¥): 79)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
àD19 GA”ý¡ø?j®©)?y®≠u)ªØ∑Ω∑®”ý¡ø?j®©)?y®≠u)ªØΩY(ji®¶)π˚
format-33.jpeg (93.65 KB, œ¬ðd¥Œîµ(sh®¥): 75)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
àD20 GA”ý¡ø?j®©)?y®≠u)ªØ∑Ω∑®”ý¡ø‘∆àD
àD21ûÈ…œ ˆ∑Ω∑®”ý¡ø?j®©)?y®≠u)ªØΩY(ji®¶)π˚÷±∑ΩàD°£œýå¶(du®¨)”⁄÷–√ÊÑ”(d®∞ng)ëB(t®§i)≈‰ú (zh®≥n)∑Ω∑®£¨GAÉû(y®≠u)ªØ∫Û”ý¡ø’˝ëB(t®§i)∑÷≤º⁄ÖÑð(sh®¨)≤ª√˜Ô@£¨–ßπ˚≤ªº∞À˘Ã·∑Ω∑®°£±Ì6Ô@ 棨‘ì∑Ω∑®À˘µ√”ý¡ø∆Ωæ˘÷µûÈ3.62 mm°¢◊Ó¥Û÷µûÈ6.02 mm°¢◊Ó–°÷µûÈ0.84 mm°¢∑Ω≤Ó÷µûÈ1.69°£å¶(du®¨)±»±æŒƒÀ˘Ã·∑Ω∑®£¨∆Ωæ˘”ý¡ø?j®©)Hœý≤Ó0.06 mm£¨µ´◊Ó¥Û”ý¡ø‘ˆº”0.19 mm£¨◊Ó–°”ý¡øúp…Ÿ0.3 mm£¨≈‰ú (zh®≥n)∫ۿ̒캔π§ïr(sh®™)Èg“≤∏¸ÈL(zh®£ng)£¨”ý¡ø?j®©)?y®≠u)ªØ∫Ûµƒ¥÷º”π§–߬ √˜Ô@≤ªº∞À˘Ã·∑Ω∑®°£¡ÌÕ‚£¨–Ë“™÷∏≥ˆ£¨þzǘÀ„∑® «ƒ£îM»æ…´ÛwΩª≤Ê°¢◊ÉÆêµ»Éû(y®≠u)ªØ«ÛΩ‚£¨þ\(y®¥n)À„÷Ð∆⁄ð^ÈL(zh®£ng)£¨∂¯÷–√ÊÑ”(d®∞ng)ëB(t®§i)≈‰ú (zh®≥n)∑Ω∑®£¨“Úúp…Ÿ¡À¸c(di®£n)‘∆îµ(sh®¥)¡ø«“≤ª≤…”√ÎSôC(j®©)«ÛΩ‚£¨“ª∞„‘⁄é◊ Æ√κ¥ø…ÕÍ≥…”ã(j®¨)À„°£æC…œÀ˘ ˆ£¨À˘Ã·∑Ω∑®æC∫œ–‘ƒÐÉû(y®≠u)”⁄GA”ý¡ø?j®©)?y®≠u)ªØ∑Ω∑®°£
format-34.jpeg (7.94 KB, œ¬ðd¥Œîµ(sh®¥): 103)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
àD21 GA≈‰ú (zh®≥n)∑Ω∑®”ý¡øΩy(t®Øng)”ã(j®¨)÷±∑ΩàD
±Ì6 GA”ý¡ø?j®©)?y®≠u)ªØ∑Ω∑®≈‰ú (zh®≥n)ΩY(ji®¶)π˚
format-35.jpeg (33.82 KB, œ¬ðd¥Œîµ(sh®¥): 71)
œ¬ðd∏Ωº˛
2022-10-12 10:51 …œÇ˜
3 ΩY(ji®¶)’ì
(1)À˘Ã·‘⁄ôC(j®©)ôzúy(c®®)Ωÿ√ÊæÄòã(g®∞u)Ω®∑Ω∑®øºë]¡À«˙√ÊÓê¡„º˛DED÷∆‘ÏÆa(ch®£n)…˙µƒ≈_(t®¢i)ÎA–ßë™(y®©ng)£¨¿˚”√≈_(t®¢i)ÎA–ßë™(y®©ng)≤®π»Œª÷√ú (zh®≥n)¥_òã(g®∞u)Ω®»~∆¨◊Ó–°Õ‚ðÜ¿™£¨±Ð√‚úy(c®®)¡ø”…÷∆‘Ï»±œðòã(g®∞u)≥…µƒ∑«’Êåç(sh®™)Õ‚ðÜ¿™°£”ý¡ø?j®©)?y®≠u)ªØΩY(ji®¶)π˚±Ì√˜À˘Ã·Ωÿ√ÊæÄòã(g®∞u)Ω®∑Ω∑®Ωo≥ˆ∏¸¥Û◊Ó–°”ý¡ødminº∞∏¸–°”ý¡ø∑Ω≤ÓS2£¨ø…±Ð√‚DEDΩ¸ÉÙ≥…–Œ”ý¡ø?j®©)?y®≠u)ªØÜñÓ}÷–æ÷≤ø”ý¡ø≤ª◊„¨F(xi®§n)œÛ°£
(2)·òå¶(du®¨)∂®ŒªÖ^(q®±)”Ú≈c¥˝º”π§Ö^(q®±)”Ú≤ªÕ¨≈‰ú (zh®≥n)æ´∂»“™«Û£¨“˝»ÎÑ”(d®∞ng)ëB(t®§i)ôý(qu®¢n)÷ÿ“Ú◊”∆Ω∫‚≤ªÕ¨ƒøòÀ(bi®°o)∫Øîµ(sh®¥)µƒ≤©ÞƒÜñÓ}£¨Õ¨ïr(sh®™)£¨Õ®þ^òã(g®∞u)‘Ïúy(c®®)¡ø¸c(di®£n)‘∆º∞¿Ì’샣–Õ¸c(di®£n)‘∆÷–√Ê£¨úp…Ÿ≈‰ú (zh®≥n)¸c(di®£n)‘∆îµ(sh®¥)¡ø°£œýð^”⁄¨F(xi®§n)”–þzǘÀ„∑®”ý¡ø?j®©)?y®≠u)ªØºº–g(sh®¥)£¨À˘Ã·∑Ω∑®Ô@÷¯Ã·∏þ¡À”ý¡ø?j®©)?y®≠u)ªØ–߬ °£
(3)±æŒƒÀ˘Ã·”ý¡ø?j®©)?y®≠u)ªØ∑Ω∑®ƒÐøÏÀŸÉû(y®≠u)ªØDED√´≈˜≈c¿Ì’샣–Õœýå¶(du®¨)Œª÷√£¨æ˘ÑÚªØúp≤ƒº”π§∫ÛÃé¿Ì”ý¡ø£¨ø…÷∏þ¡„º˛‘ˆúp≤ƒèÕ(f®¥)∫œº”π§–߬ ≤¢úp–°¡„º˛àÛ(b®§o)èU¬ °£∫Û¿m(x®¥)úp≤ƒ“é(gu®©)Ñù—–æøå¢þM(j®¨n)“ª≤ΩÚû(y®§n)◊C∫Õ”ë’ì∏¸èÕ(f®¥)Îs¡„º˛”ý¡øªØ∫Ûµƒ–߬ ÷…˝–ßπ˚°£
Ö¢øºŒƒ´I(xi®§n)£∫
[1] LIU S£¨ SHIN Y C. Additive Manufacturing of Ti6Al4V Alloy£∫a Review[J]. Materials and Design£¨ 2019£¨ 164£∫1-23.
[2] Óô∂¨∂¨£¨ èàºt√∑£¨ Íê∫Ȕӣ¨ µ». ∫Ωø’∫ΩÃÏ∏þ–‘ƒÐΩåŸ≤ƒ¡œòã(g®∞u)º˛º§π‚‘ˆ≤ƒ÷∆‘Ï[J]. ÷–á¯(gu®Æ)º§π‚£¨ 2020£¨ 47(5)£∫32-55.
GU Dongdong£¨ ZHANG Hongmei£¨ CHEN Hongyu£¨ et al. Laser Additive Manufacturing of High-performance Metallic Aerospace Components[J]. Chinese Journal of Lasers£¨ 2020£¨ 47(5)£∫32-55.
[3] DEBROY T£¨ WEI H L£¨ ZUBACK J S£¨ et al. Additive Manufacturing of Metallic Components-process£¨ Structure and Properties[J]. Progress in Materials Science£¨ 2018£¨ 92£∫112-224.
[4] KARUNAKARAN K P£¨ SURYAKUMAR S£¨ PUSHPA V£¨ et al. Low Cost Integration of Additive and Subtractive Processes for Hybrid Layered Manufacturing[J]. Robotics and Computer Integrated Manufacturing£¨ 2010£¨ 26(5)£∫490-499.
[5] MAYER T£¨ BRNDLE G£¨ SCHNENBERGER A£¨ et al. Simulation and Validation of Residual Deformations in Additive Manufacturing of Metal Parts[J]. Heliyon£¨ 2020£¨ 6(5)£∫e03987.
[6] BIKAS H£¨ STAVROPOULOS P£¨ CHRYSSOLOURIS G. Additive Manufacturing Methods and Modelling Approaches£∫a Critical Review[J]. The International Journal of Advanced Manufacturing Technology£¨ 2016£¨ 83(1/4)£∫389-405.
[7] ≤Ð÷¯√˜£¨ åOºt√∑£¨ ∑∫£Ðä. ƒ≥ŒÂðSîµ(sh®¥)øÿº”π§÷––ƒ‘⁄æÄôzúy(c®®)ÍP(gu®°n)ÊIºº–g(sh®¥)—–æø[J]. ôC(j®©)–µ‘O(sh®®)”ã(j®¨)≈c÷∆‘Ï£¨ 2017(11)£∫149-152.
CAO Zhuming£¨ SUN Hongmei£¨ SHI Haijun. The Research on the Key Technology of On-line Inspectionof a Five-axis NC Machining Center[J]. Machinery Design and Manufacture£¨ 2017(11)£∫149-152.
[8] AHN D£¨ KWEON J H£¨ KWON S£¨ et al. Representation of Surface Roughness in Fused Deposition Modeling[J]. Journal of Materials Processing Tech.£¨ 2009£¨ 209(15/16)£∫5593-5600.
[9] KAJI F£¨ BARARI A. Evaluation of the Surface Roughness of Additive Manufacturing Parts Based on the Modelling of CUSP Geometry[J]. IFAC-Papers Online£¨ 2015£¨ 48(3)£∫658-663.
[10] SHEN B£¨ HUANG G Q£¨ MAK K L£¨ et al. A Best-fitting Algorithm for Optimal Location of Large-scale Blanks with Free-form Surfaces[J]. Journal of Materials Processing Technology£¨ 2003£¨ 139(1/3)£∫310-314.
[11] LI X£¨ LI W£¨ JIANG H£¨ et al. Automatic Evaluation of Machining Allowance of Precision Castings Based on Plane Features from 3D Point Cloud[J]. Computers in Industry£¨ 2013£¨ 64(9)£∫1129-1137.
[12] SUN Y W£¨ XU J T£¨ GUO D M£¨ et al. A Unified Localization Approach for Machining Allowance Optimization of Complex Curved Surfaces[J]. Precision Engineering£¨ 2009£¨ 33(4)£∫516-523.
[13] èà¨ì£¨ Ñ¢√Ù£¨ èà∂®»A£¨ µ». ª˘”⁄‘⁄æÄôzúy(c®®)µƒ»~∆¨º”π§”ý¡ø◊‘þmë™(y®©ng)Éû(y®≠u)ªØ∑Ω∑®[J]. ”ã(j®¨)À„ôC(j®©)ºº–g(sh®¥)≈c∞l(f®°)’𣨠2014£¨ 24(11)£∫226-229.
ZHANG Ying£¨ LIU Min£¨ ZHANG Dinghua£¨ et al. An Adaptive Approach for Machining Allowance Balancing for Blade Based on Online Measurement[J]. Computer Technology and Development£¨ 2014£¨ 24(11)£∫226-229.
[14] YING Z£¨ ZHANG D£¨ WU B. An Approach for Machining Allowance Optimization of Complex Parts with Integrated Structure[J]. Journal of Computational Design and Engineering£¨ 2015£¨ 2(4)£∫248-252.
[15] èà√˜µ¬£¨ ÒRéõ£¨ ÷xò∑£¨ µ». ¥Û–Õ¥¨”√¬ð–˝ò™◊‘þmë™(y®©ng)º”π§∑Ω∑®—–æø[J]. ôC(j®©)–µø∆åW(xu®¶)≈cºº–g(sh®¥)£¨ 2019£¨ 38(11)£∫1752-1759.
ZHANG Mingde£¨ MA Shuai£¨ XIE Le£¨ et al. Study on Adaptive Machining Method for Large Marine Propeller[J]. Mechanical Science and Technology for Aerospace Engineering£¨ 2019£¨ 38(11)£∫1752-1759.
[16] GAO Y Z£¨ DU Z J£¨ LI M Y£¨ et al. An Automated Approach for Machining Allowance Evaluation of Casting Parts[J]. International Journal of Computer Integrated Manufacturing£¨ 2019£¨ 32(11)£∫1043-1052.
[17] ‘¿æß. ’˚Ûw»~ðÜ‘⁄ôC(j®©)ôzúy(c®®)≈cº”π§”ý¡ø?j®©)?y®≠u)ªØºº–g(sh®¥)—–æø[D]. Œ‰ùh£∫»A÷–ø∆ºº¥ÛåW(xu®¶)£¨ 2016.
YUE Jing. Research on On-machine Measuring and Allowance Optimization Technology of the Integral Impeller[D]. Wuhan£∫Huazhong University of Science and Technology£¨ 2016.
[18] ◊T∏þ…Ω£¨ èàù˝£¨ èà˚ê∆G£¨ µ». ª˘”⁄Ñ”(d®∞ng)ëB(t®§i)æ´∂»‘u(p®™ng)π¿ôC(j®©)÷∆µƒ◊‘þmë™(y®©ng)∂®Œª∑Ω∑®[J]. ”ã(j®¨)À„ôC(j®©)ºØ≥…÷∆‘ÏœµΩy(t®Øng)£¨ 2021£¨ 27(12)£∫3550-3558.
TAN Gaoshan£¨ ZHANG Tao£¨ ZHANG Liyan£¨ et al. Adaptive Localization Method Based on Dynamic Accuracy Assessment Mechanism[J]. Computer Integrated Manufacturing Systems£¨ 2021£¨ 27(12)£∫3550-3558.
[19] ÕıÕ˛’Ò£¨ ƒ™»ÿ£¨ »f(w®§n)ƒÐ. »~∆¨ƒ£–Õπ´≤Óºs ¯ólº˛œ¬µƒ≈‰ú (zh®≥n)∑Ω∑®—–æø[J]. ”ã(j®¨)À„ôC(j®©)π§≥Ã≈cë™(y®©ng)”√£¨ 2013£¨ 49(10)£∫264-266.
WANG Zhenwei£¨ MO Rong£¨ WAN Neng. Tolerance Zone Constrained Registration Method for Aeroengine Blade Models[J]. Computer Engineering and Applications£¨ 2013£¨ 49(10)£∫264-266.
[20] BESL P J£¨ MCKAY N D. A Method for Registration of 3-D Shapes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence£¨ 1992£¨ 14(2)£∫239-256.
[21] Ñ¢”Ó£¨ –Д–Çê. ª˘”⁄”–ΩÁK-Dò‰µƒ◊ÓΩ¸¸c(di®£n)À—À˜À„∑®[J]. »A÷–ø∆ºº¥ÛåW(xu®¶)åW(xu®¶)àÛ(b®§o)(◊‘»ªø∆åW(xu®¶)∞Ê)£¨ 2008£¨ 36(7)£∫73-76.
LIU Yu£¨ XIONG Youlun. Algorithm for Searching Nearest-neighbor Based on the Bounded K-D Tree[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition)£¨ 2008£¨ 36(7)£∫73-76.
[22] ARUN K S£¨ HUANG T S£¨ BLOSTEIN S D. Least-squares Fitting of Two 3-D Point Sets[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence£¨ 1987£¨ 9(5)£∫689-700.
[23] ø◊ѢǕ£¨ Õı’Ò÷“£¨ »~≥¨£¨ µ». ŒÂðS‘ˆúp≤ƒªÏ∫œº”π§÷––ƒºØ≥…È_∞l(f®°)ºº–g(sh®¥)—–æø[J]. ∫Ωø’÷∆‘Ϻº–g(sh®¥)£¨ 2019£¨ 62(6)£∫53-59.
KONG Liuwei£¨ WANG Zhenzhong£¨ YE Chao£¨ et al. Research on Developing Technology of Five-axis Additive-subtractive Hybrid Machining Center[J]. Aeronautical Manufacturing Technology£¨ 2019£¨ 62(6)£∫53-59.
Subtractive Post-machining Allowance Optimization Considering Characteristics of DEDs
HOU Liang GUO Jing CHEN Yun YE Chao XU Yang ZOU Jiahao
Department of Mechanical and Electric Engineering£¨Xiamen University£¨Xiamen£¨F(xi®§n)ujian£¨361005
Abstract£∫ Complex free-form parts manufactured by DED had problems of uneven allowance distributions and severe stair-case effects. In order to optimize allowances for subtractive post-machining£¨ a dynamic point cloud registration method using the mid-surface points of the deposited and theoretical parts was proposed to optimize the machining allowances£¨ which took into consideration characteristics of the DED parts. Firstly£¨ the section line of the minimum outer envelope of deposited complex free-form parts was constructed according to the deposition scanning path£¨ and was used for obtaining the point cloud of the on-machine measurement. Secondly£¨ the mid-surface points of the deposited and theoretical parts were extracted£¨ and an iterative closest point with dynamic weights considering the multi-region allowance requirements was proposed to optimize the machining allowances. The feasibility of the algorithm was verified by two simple cases. Finally£¨ a free-form blade of a centrifugal impeller was selected as a complex case for allowance optimization. The proposed method was also compared with the method for multi-region allowance using genetic algorithm. The results show that the proposed allowance optimization method is more accurate and efficient for rapid optimization of machining allowances for DED manufactured complex curved parts.
Key words£∫ directed energy deposition(DED)£ª allowance optimization£ª on-machine measurement£ª dynamic registration£ª stair-case effect
◊˜’þ∫Ü(ji®£n)ΩÈ£∫∫Ó ¡¡£¨ƒ–£¨1974ƒÍ…˙£¨Ωà ⁄°¢≤© ø—–æø…˙åß(d®£o)éü°£—–æø∑ΩœÚ?y®§n)È¥Û≈˙¡øÇÄ(g®®)–‘ªØ∂®÷∆∫Õ‘ˆúpèÕ(f®¥)∫œ÷∆‘ϵ»°£∞l(f®°)±Ì’쌃197∆™°£E-mail£∫
[email protected]°£Íê ‘∆(Õ®–≈◊˜’þ)£¨≈Æ£¨1987ƒÍ…˙£¨÷˙¿ÌΩà ⁄°£—–æø∑ΩœÚ?y®§n)È‘ˆúpèÕ(f®¥)∫œ÷∆‘Ï°¢Îyº”π§≤ƒ¡œ«–œ˜ôC(j®©)¿Ì°¢æ´√Ðôzúy(c®®)µ»°£∞l(f®°)±Ì’쌃21∆™°£E-mail£∫
[email protected]°£









 ’≤ÿ
’≤ÿ ÞD(zhu®£n)≤•
ÞD(zhu®£n)≤• ÷ß≥÷
÷ß≥÷ ∑¥å¶(du®¨)
∑¥å¶(du®¨)
 æ©π´æW(w®£ng)∞≤lj11010802043351
æ©π´æW(w®£ng)∞≤lj11010802043351