來源:摩方高精密
先進(jìn)機器人抓持器的發(fā)展旨在通過可控的黏附力和摩擦力實現(xiàn)高效,、靈活和穩(wěn)定的物體操控。例如,,具有強摩擦力和弱黏附力的柔性附著墊,,可以實現(xiàn)可靠和高效的晶圓運輸。具有光滑足墊的昆蟲,,例如蟑螂,、蝗蟲、螽斯等,,可以實現(xiàn)高度動態(tài)的附著和分離,,即在奔跑和跳躍等高速運動中實現(xiàn)足墊的強摩擦和弱黏附。因此,,理解和模擬昆蟲光滑足墊的增摩結(jié)構(gòu)可以促進(jìn)具有攀爬和抓握功能的機器人發(fā)展,。
近日,南京航空航天大學(xué)機電學(xué)院姬科舉副研究員/戴振東教授課題組根據(jù)仿生原理設(shè)計和制造了一種可以同時實現(xiàn)強摩擦力和弱黏附力的仿生柔性附著機構(gòu),,靈感來自于昆蟲光滑足墊的內(nèi)部角質(zhì)層結(jié)構(gòu),。對于動物來說,通過足肢抓住和操縱物體,,從而實現(xiàn)與環(huán)境之間的高效互動對于它們的生存至關(guān)重要,。經(jīng)過億萬年的發(fā)展,這些末端效應(yīng)器,,例如人類的手,、昆蟲的腳、章魚的觸須和貓的爪等,,已經(jīng)進(jìn)化出不同的結(jié)構(gòu)和功能以適應(yīng)環(huán)境挑戰(zhàn),。其中,昆蟲因其強大的運動能力成為了仿生機器人領(lǐng)域的熱點研究對象,。研究團(tuán)隊發(fā)現(xiàn)昆蟲光滑足墊的高適應(yīng)性,、高摩擦力和弱黏附力來自于其圓弧表面和內(nèi)部樹枝狀結(jié)構(gòu)的共同作用,并且其表面與內(nèi)部結(jié)構(gòu)的參數(shù)對于摩擦性能存在最佳值,。該研究通過仿生設(shè)計原理實現(xiàn)了一種簡單的增摩減黏柔性附著結(jié)構(gòu)設(shè)計策略,,為機器人抓持器與附著單元的設(shè)計與制造提供了新思路。
相關(guān)研究成果以“Insect-inspired design strategy for flexible attachments with strong frictional force and weak pull-off force”為題發(fā)表在國際摩擦學(xué)領(lǐng)域著名期刊《Tribology International》上(SCI一區(qū),,Top期刊,,IF=6.20)。南京航空航天大學(xué)機電學(xué)院博士研究生趙家輝為第一作者,,南京航空航天大學(xué)機電學(xué)院姬科舉副研究員與戴振東教授為共同通訊作者,。該工作得到了國家自然科學(xué)基金委的大力支持,。

640.jpg (50.02 KB, 下載次數(shù): 115)
下載附件
2024-1-26 09:59 上傳
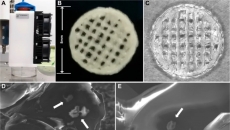
本研究設(shè)計的仿生柔性墊采用硬質(zhì)模板法制備,所有模具均使用摩方精密microArch® S140(精度:10μm)光固化3D打印設(shè)備制造,,制造工藝原理圖如圖1a所示,。仿生柔性墊的表面粗糙度、接觸角和楊氏模量分別采用激光共聚焦顯微鏡,、接觸角測試儀和萬能拉伸試驗機進(jìn)行測試(圖1b和c),。摩擦和黏附性能由Bruker的UMT-2測得,具體步驟如圖1d和e,。
640-1.jpg (103.93 KB, 下載次數(shù): 125)
下載附件
2024-1-26 09:59 上傳
圖1 a)通過模具澆筑制造仿生柔性墊的過程示意圖,;b)仿生柔性墊的表面粗糙度和疏水性;c)商用PDMS的應(yīng)力-應(yīng)變曲線,;d) 受抑光在試驗臺中的全反射圖,;e) 本研究中使用的摩擦測量程序示意圖和測試平臺的照片。
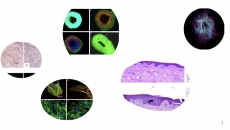
自然界中存在著多種不同粗糙度的表面,,包括許多植物的葉子,、巖石表面和樹干表皮等。昆蟲的足墊可以很好地適應(yīng)這些表面并以此為基底來為自己提供顯著的動力(圖2a,、d和g),。這些昆蟲的摩擦墊部分由四個半球形的跗墊(圖2b、e和h)組成,,這一特征幾乎普遍存在于所有光滑的昆蟲足墊中,,包括蟋蟀和竹節(jié)蟲等,。內(nèi)部結(jié)構(gòu)的橫斷面掃描電鏡圖像(圖2c,、f和i)顯示了昆蟲具有均勻厚度的光滑膜狀表皮,并且在內(nèi)膜層以下均勻分布著縱向排列的樹枝狀結(jié)構(gòu),。
640-2.jpg (97.19 KB, 下載次數(shù): 123)
下載附件
2024-1-26 09:59 上傳
圖2 螽斯,、蝗蟲和蟑螂的足墊結(jié)構(gòu) a、d,、g)螽斯,、蝗蟲和蟑螂的攀爬抓握形態(tài);b,、e,、h)足墊的腹面視圖;c,、f,、i)足墊接觸區(qū)域的橫截面。
為了闡明表面曲率對摩擦行為的影響,,團(tuán)隊設(shè)計并制備了三種曲率分別為0,、10和20m-1的實心墊,,分別命名為S0、S1和S2,。摩擦性能測試結(jié)果顯示,,隨著表面曲率的增大,材料的角度適應(yīng)性變好,,并且不會出現(xiàn)粘滑失效現(xiàn)象,。然而,對于實心墊來說,,表面曲率增大會使其實際接觸面積減小,,從而導(dǎo)致摩擦力大幅度降低,結(jié)果如圖3所示,。
640-3.jpg (100.75 KB, 下載次數(shù): 114)
下載附件
2024-1-26 09:59 上傳
圖3 不同法向力下實心墊的摩擦試驗 a-c)曲率為 0,、10 和 20m-1 且基底角度為 0° 的實心墊的力-時間曲線;d-f)實心墊在基底角度為0°,、1°,、2°和3°時的摩擦力;g)不同曲率實心墊受力時的有限元分析,。
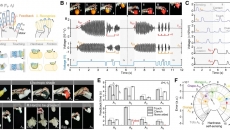
基于上述掃描電鏡圖像中關(guān)鍵的內(nèi)部結(jié)構(gòu),,團(tuán)隊設(shè)計并制作了一個直徑為20mm,表面曲率為20m-1的仿生柔性墊(圖4a),。在本研究中,,柱子的朝向垂直于彎曲的表面接觸膜,并固定在一個平坦的剛性背襯層上,。其中,,四個主要的結(jié)構(gòu)參數(shù)可能會影響仿生柔性墊的摩擦性能,分別為柱直徑(R1),、柱中心距離(R2),、最大柱高度(L1)和接觸膜厚度(L2)。對多個參數(shù)的分析表明,,仿生柔性墊的摩擦力主要受兩個比值的影響:R1/L2和(R1)2/(R2)2,。對于柔性和均勻的粘彈性材料,R1/L2和(R1)2/(R2)2的物理意義分別表示向接觸膜中傳播的力的垂直深度和水平寬度,。在本研究中,,所選用材料確定的合適的結(jié)構(gòu)比值為R1/L2 = 0.75和((R1)2/(R2)2 = 0.36。
640-4.jpg (171.27 KB, 下載次數(shù): 137)
下載附件
2024-1-26 09:59 上傳
圖4 a)仿生柔性墊的照片和示意圖,;b)仿生柔性墊在不同法向力下以R1/L2和(R1)2/(R2)2為函數(shù)的剪切力,;c-f)通過動力學(xué)實驗和模擬分析R1/L2和(R1)2/(R2)2對摩擦力的影響。
團(tuán)隊選擇了8種不同粗糙度的基底來測試仿生柔性墊對不同材料表面的適應(yīng)性(圖5a),。結(jié)果顯示,,在相對較高的正常載荷(1.0–3.0 N)下,,仿生柔性墊對不同基底的摩擦力主要受材料的影響,而表面粗糙度的影響可以忽略不計(圖5b),。然而,,在較低的法向載荷(0.5 N)下,摩擦力隨著基底表面粗糙度的增加而顯著降低(圖5c),,這可以歸因于粗糙表面上的黏附失效,。因此,當(dāng)表面粗糙度超過0.408 μm時,,仿生柔性墊與基底之間的摩擦主要以犁溝力為主,。圖5d展示了仿生柔性墊在垂直和大傾斜角攀爬中的應(yīng)用,表明了本研究所開發(fā)的強摩擦材料具有廣泛的應(yīng)用前景,。
640-5.jpg (126.6 KB, 下載次數(shù): 131)
下載附件
2024-1-26 09:59 上傳
圖5 a)8種具有不同粗糙度的基底,;b)仿生柔性墊在相對較高的法向載荷(1.0–3.0 N)下對8種基底的摩擦力;c)較低載荷下仿生柔性墊的摩擦力隨表面粗糙度的變化,;d)仿生柔性墊陣列的實際應(yīng)用,。
結(jié)論:受昆蟲光滑足墊的內(nèi)部結(jié)構(gòu)啟發(fā),本研究通過3D打印模具技術(shù)制造了可以大規(guī)模生產(chǎn)的仿生柔性墊,。其摩擦力和黏附力主要受柱直徑,、柱中心距離、最大柱高度,、接觸膜厚度和表面曲率五個參數(shù)的影響,。因此,可以通過調(diào)整這些參數(shù)來控制其力學(xué)性能,,從而保證仿生柔性墊在快速動態(tài)運動中的強摩擦力和易脫附性,。具有強摩擦力和弱黏附力的仿生柔性墊在先進(jìn)制造中具有潛在的應(yīng)用前景,如飛機檢驗,、夾持機器人和半導(dǎo)體器件加工等,。
原文鏈接:
https://doi.org/10.1016/j.triboint.2023.108973
|








 收藏
收藏 轉(zhuǎn)播
轉(zhuǎn)播 支持
支持 反對
反對
 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351