來源: EFL生物3D打印與生物制造
過去十年間,可拉伸離子電子學日益受到關注,并在工程和生物醫(yī)學領域得到廣泛應用。然而,現(xiàn)有的離子電子傳感器由于器件結構簡單,傳感能力有限,而且由于成分泄漏,其穩(wěn)定性較差。
為了解決這些問題,來自南方科技大學的葛锜和楊燦輝團隊進行了如下努力:
①利用基于 DLP 的三維打印技術和聚電解質彈性體,合理地設計和制造了大量具有多模式傳感能力的結構化無泄漏離子電子傳感器。
②本研究為聚電解質彈性體合成了一種光聚合離子單體,這種單體具有可拉伸、透明、離子導電、熱穩(wěn)定性和防泄漏等特性。
③打印出的傳感器具有堅固的接口和非凡的長期穩(wěn)定性。多材料三維打印技術使結構設計具有高度靈活性,能夠感應拉力、壓縮力、剪切力和扭轉力,并可通過精心設計的器件架構程序按需定制靈敏度。
④此外,本研究還制作了集成離子電子的傳感器,可同時感知不同的機械刺激,而不會出現(xiàn)信號相互干擾的情況。
⑤本研究展示了一個由四個剪切傳感器和一個壓縮傳感器組成的傳感套件,并將其連接到一個遠程控制系統(tǒng),該系統(tǒng)經過編程可無線控制無人機的飛行。無泄漏聚電解質彈性體的多材料三維打印技術同時解決了穩(wěn)定性和功能性方面的不足,為制造可拉伸離子電子器件鋪平了新的道路。
相關工作以題為“Polyelectrolyte elastomer-based ionotronic sensors with multi-mode sensing capabilities via multi-material 3D printing”的文章發(fā)表在2023年8月10日的國際頂級期刊《Nature Communications》。

640 2.jpg (71.08 KB, 下載次數(shù): 356)
下載附件
2024-5-16 15:16 上傳
1. 創(chuàng)新型研究內容
多材料三維打印技術在結構設計上的高度靈活性,使得模仿人體皮膚傳感性能的離子電子傳感器的制造成為可能。如圖 1所示,以離子為電荷載體的人體皮膚含有各種機械感受器,能夠進行多模式傳感,如壓縮、拉伸、壓縮和剪切聯(lián)合傳感以及扭轉和壓縮聯(lián)合傳感。值得注意的是,人體皮膚可以感知組合變形,同時在沒有信號交叉的情況下破譯單個刺激。通過模仿人體皮膚的感知能力,本研究設計并打印了各種具有多模式感知能力的結構化離子電子傳感器,包括拉伸、壓縮、剪切、扭轉、拉伸和壓縮組合、壓縮和剪切組合以及扭轉和壓縮組合。為此,本研究使用自建的基于 DLP 的多材料 3D 打印系統(tǒng)和聚電解質彈性體(以下簡稱 PEE)和介電彈性體(以下簡稱 DE)的光固化前體打印離子電子傳感器。該系統(tǒng)采用 “自下而上”的投影方法,數(shù)字化的紫外線圖案由紫外線光引擎照射,紫外線光引擎位于打印臺的下方,打印臺可垂直移動,以控制每個切片的厚度。在紫外光引擎和打印平臺之間有一塊玻璃板,上面裝有兩個聚合物前驅體容器,玻璃板水平移動以輸送前驅體。離子電容式傳感器通常包括一層 DE 和兩層 PEE。PEE 包含固定陰離子(或陽離子)和移動反離子,可防止離子泄漏。由于在打印過程中形成了共價和拓撲互聯(lián),PEE 和 DE 之間形成了堅固的界面。一般來說,離子電子學傳感器比電子學傳感器更柔軟、更易拉伸。此外,由于離子電子傳感器也采用離子作為電荷載體,因此有可能提供與生物系統(tǒng)銜接的無縫的接口。
640-1.jpg (54.88 KB, 下載次數(shù): 346)
下載附件
2024-5-16 15:16 上傳
圖1 通過基于 DLP 的多材料 3D 打印技術制造具有多模式傳感功能的仿皮膚離子電子傳感器
本研究首先合成了光固化 PEE。雖然 PEE 可通過各種化學方法實現(xiàn),但本研究在此合成了一對陽離子和陰離子--1-丁基-3-甲基咪唑鎓丙烯酸 3-磺丙酯(以下簡稱 BS)(圖 2),它看起來是一種透明液體。BS 的陰離子含有用于自由基光聚合的丙烯酸酯官能團。1H-NMR 光譜驗證了 BS 的組成和化學結構。由于離子一般都具有吸濕性,BS 的均聚合產生的 PEE 容易受到水的侵蝕。含水量的變化會導致 PEE 性能的波動。為了解決這個問題,本研究將 BS 與另一種疏水性丙烯酸酯類單體乙二醇甲基醚丙烯酸酯(MEA)共聚,并使用 1,6-己二醇二丙烯酸酯(HDDA)作為交聯(lián)劑。在紫外光照射下進行無規(guī)共聚后,得到了陰離子接枝到主鏈上而陽離子可移動的聚(1-丁基-3-甲基咪唑-3-磺丙基丙烯酸酯-丙烯酸乙二醇甲醚)(p(BS-co-MEA))網(wǎng)絡。當 BS:MEA 的摩爾比小于 1:1 時,p(BS-co-MEA) 因水分蒸發(fā)而造成的重量損失低于 5%。聚合前后 p(BS-co-MEA)前體的傅立葉變換紅外光譜顯示,乙烯基相應的吸收峰 ~1636 cm-1 消失,表明單體已完全轉化。
640-2.jpg (99.13 KB, 下載次數(shù): 355)
下載附件
2024-5-16 15:16 上傳
圖2 PEE的合成與表征
本研究使用 PEE 和商用丙烯酸酯彈性體 Tango(Stratasys Ltd., Eden Prairie, MN, USA)作為 DE,探索基于 DLP 的離子電子傳感器多材料 3D 打印技術。為了使前體與打印系統(tǒng)兼容,本研究使用 2,4,6-三甲基苯甲酰基二苯基氧化膦(TPO)作為光引發(fā)劑。本研究通過對 PEE 和 DE 的原始照片特征進行分析來設計實驗方案。如圖 3 所示,本研究確定了凝膠化時間,當存儲模量曲線相交時的損耗模量曲線。要固化 50 μm 厚的層,DE 的凝膠化時間約為 2 秒,而 PEE 的凝膠化時間約為 11 秒,這表明這兩種材料都具有很強的光固化能力。此外,本研究還進行了光流變特性分析,以確定固化不同層厚的 PEE 或 DE 樣品所需的凝膠化時間(或能量密度)。在此,本研究要指出的是,具體來說,由于光敏性高,300 μm 厚的 PEE 樣品的固化時間為 45.8 秒(在 384.7 mJ cm-2 的 405 nm 紫外線投射下),DE 樣品的固化時間為 20.6 秒(在 173.0 mJ cm-2 的 405 nm 紫外線投射下)。此外,本研究還通過打印網(wǎng)格圖案板進一步測試了 PEE 和 DE 的雙材料可打印性,在網(wǎng)格圖案板上,透明 DE 線的寬度為 100 μm,淺黃色的 PEE 塊嵌入 DE 網(wǎng)格中。打印 PEE 具有與澆鑄 PEE 相似的機械性能,并表現(xiàn)出優(yōu)異的彈性和機械穩(wěn)定性。在最大應變?yōu)?100%、循環(huán)拉伸 300 次之后,從應力-應變曲線上可以檢測到模量幾乎沒有滯后或退化。單軸拉伸試驗得出的楊氏模量是通過應變范圍為 0-5% 的應力-應變曲線的線性擬合得到的,PEE、DE 和傳感器的楊氏模量分別為 156 ± 19 kPa、799 ± 57 kPa 和 526 ± 33 kPa。如果 PEE 和 DE 的厚度分別為 0.2 毫米和 0.4 毫米,則傳感器的加權平均模量為 588 千帕,與實驗結果十分吻合。
640-3.jpg (114.67 KB, 下載次數(shù): 383)
下載附件
2024-5-16 15:16 上傳
圖3 打印的離子電子傳感器的特性
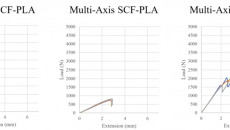
第一代可拉伸離子電子傳感器已被用于模擬神經感覺系統(tǒng)。然而,除了拉伸和壓縮之外,以前報道的傳感器很少能感應到機械刺激。傳感多樣性的匱乏極大地阻礙了對人體皮膚等神經感覺系統(tǒng)的近似模仿,因為人體皮膚不僅能感知拉伸和壓縮,還能感知剪切、扭轉及其組合。基于 DLP 的多材料 3D 打印技術可將 PEE 和 DE 無縫集成到單個離子電子傳感器中,從而設計和制造出具有多模式傳感功能的離子電子傳感器。圖 4a 是啞鈴形拉伸傳感器的示意圖。在單軸拉力作用下,面積增大,厚度縮小,從而電容增大,即△C∝△A/△d。傳感器在 50%的拉伸應變范圍內表現(xiàn)出極佳的線性響應,靈敏度(定義為 δ(ΔC/C0)/δε,其中 ε 為拉伸應變)為 0.51。有限元分析(FEA)顯示,雖然大部分變形發(fā)生在中心部分,但ΔC/C0 大多隨拉伸應變呈線性變化,這與實驗結果完全一致。在最大應變?yōu)?30% 的循環(huán)拉伸條件下,傳感器保持了機械和電氣穩(wěn)定性,在 1800 個循環(huán)周期中,應力衰減可忽略不計,電容漂移在 2% 以內。圖 4c 是圓形壓縮傳感器的示意圖。壓縮力減小了 DE 層的厚度,其面積的變化可以忽略不計,傳感器的電容也相應增加,即△C∝1/△d。由于 DE 的高硬度和不可壓縮性,均勻 DE 層的傳感器靈敏度較差,而 3D 打印提供了一種簡便的方法,可以在 DE 層上賦予微結構,降低 DE 層的硬度,從而提高傳感器的靈敏度。圖 4d 顯示了有/無微結構傳感器的 ΔC/C0 隨壓力 (P) 的變化情況。微結構傳感器的靈敏度為 3.41 kPa-1,比無微結構傳感器高出兩個數(shù)量級。同樣,該傳感器在 10000 次循環(huán)加載過程中表現(xiàn)出的超強穩(wěn)定性也體現(xiàn)了其突出的耐用性。
640-4.jpg (109.05 KB, 下載次數(shù): 366)
下載附件
2024-5-16 15:16 上傳
圖4 用于拉伸、壓縮、剪切和扭轉的離子電子傳感器
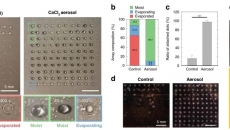
人體皮膚具有多種功能,可單獨或同時感知各種機械擾動,但離子電子傳感器尚未實現(xiàn)這種多模式感知能力。雖然拉伸傳感器也可用于感知壓縮,但拉伸和壓縮信號會相互混淆,在聯(lián)合加載時很難解耦。在此,本研究展示了具有多模式傳感能力但不會產生相互信號干擾的集成離子電子傳感器。首先設計并制造了一個集成離子電子傳感器,它可以破譯壓縮、拉伸或它們的組合信號。傳感器的設計和原理見圖 5a。右邊部分是由電容計 C1 監(jiān)控的壓縮傳感器,下面部分是由電容計 C2 監(jiān)控的拉伸傳感器。需要注意的是,這兩個傳感器有一個共用電極和兩個獨立電極,它們之間的距離遠大于 DE 層的厚度,以盡量減少信號串擾。此外,拉伸傳感器的 DE 層比壓縮傳感器的 DE 層薄得多,因此當拉伸傳感器啟動時,壓縮傳感器 DE 層的相對厚度變化可以忽略不計。圖 5b 顯示了集成拉伸和壓縮傳感器的打印快照圖像。圖 5c 顯示了傳感器的等效電路圖,其中 PEE 被視為純電阻器(R1、R2 和 R3),DE 被視為可調電容器(壓縮單元為 C1',拉伸單元為C2'),雙電層被視為純電容器(CEDL)。電容器 C1' 和電容表 C1 構成壓縮傳感器的子電路。電容器 C2' 和電容計 C2 構成拉伸傳感器的子電路。由于共用元件 R2 和 CEDL 是常數(shù),因此兩個子電路相互獨立。
本研究采用單負載來探測傳感器的響應。如圖 5d 所示,在 25% 壓縮應變下,C1 增加 27.87%,C2 增加 2.22%,信號比為 12.6;在 50% 拉伸應變下,C2 減少 10.14%,C1 增加 0.32%,信號比為 31.7。此外,拉伸時電容變化的相反趨勢也有利于信號去耦。有限元分析結果還顯示,當傳感器受到壓縮或拉伸時,C1 和 C2 的信號之間存在顯著差異。信號解耦的關鍵在于通過適當?shù)慕Y構設計,盡量減少一個傳感器在另一個傳感器發(fā)生變形時的相關變形。一個反例是,設計不當?shù)膫鞲衅?C1 和 C2 的電容都會隨著拉伸應變發(fā)生顯著變化。
本研究進行了 10 次不同應變的加載和卸載循環(huán),并監(jiān)測電容的實時變化。如圖 5e 所示,壓縮應變導致 C1 的 ΔC/C0 顯著增加,而 C2 的 ΔC/C0 的增加則低一個數(shù)量級。同樣,可以觀察到 C2 的 ΔC/C0 明顯下降,但當傳感器處于拉伸狀態(tài)時,C1 的信號變化可以忽略不計(圖 5f)。出色的信號重復性進一步證明了傳感器的穩(wěn)定性。為了證明傳感器具有出色的信號與組合變形解耦能力,本研究對傳感器施加了一系列組合壓縮(從 0% 到 33%)和拉伸(從 0% 到 100% )。可以看出,只有壓縮才會導致 C1 的 ΔC/C0 發(fā)生顯著變化,而只有拉伸才會導致 C2 的 ΔC/C0 發(fā)生顯著下降(圖 5g)。因此,通過比較圖 5g 中的兩幅圖,可以解讀任意組合的壓縮和拉伸。
640-5.jpg (112.83 KB, 下載次數(shù): 382)
下載附件
2024-5-16 15:16 上傳
圖5 各種集成離子電子傳感器
可拉伸離子電子器件具有優(yōu)異的機械和電子順應性,因此很有希望與人體連接。作為概念驗證,本研究展示了一種可與無人機進行無線通信的可穿戴遙控裝置。控制器系統(tǒng)框圖如圖 6a 所示。遙控裝置集成了五個傳感器:一個壓縮傳感器和四個剪切傳感器,用作輸入端口。啟動時,每個傳感器都會產生一個電容變化信號,該信號通過一個時間繼電器饋送到一個 LCR 表。定制的 LabVIEW 控制程序收集和處理信號,并將其發(fā)送到打印電路板(PCB),PCB 通過電磁波向無人機發(fā)出指令。圖 6b 描述了剪切傳感器和壓縮傳感器的工作模式。與圖 4e 中包含一個因 DE 層而產生的電容器的傳感器不同,遙控裝置的剪切傳感器包含一個因空氣而產生的電容器和兩個因電氣雙層而產生的電容器(圖 6c)。剪切時,PEE 相互接觸,消除空氣電容,導致電容發(fā)生數(shù)量級的巨大變化。壓縮傳感器與圖 4c 類似,由兩層 PEE 和一層 DE 組成。它的電容隨施加的壓力而增加。本研究描述了五個傳感器的響應特征,并繪制了它們的歸一化電容在 10 個加載和卸載周期中的變化(圖 6d)。剪切力傳感器的電容在接通后增加了 104 倍以上。這種巨大的信號具有噪聲容限,非常有利于電路設計。本研究將剪切傳感器的開啟閾值設定為 1000,壓縮傳感器的開啟閾值設定為 1.1。值得注意的是,電容式傳感器 1.1 的閾值主要受限于完整的 DE 層,但仍足以滿足編程要求。通過在電容式傳感器的 DE 層構建微結構,可以實現(xiàn)更高的閾值(圖 4d)。遙控裝置傳感器與無人機指令之間的映射關系見圖 6e。
640.jpg (97.58 KB, 下載次數(shù): 396)
下載附件
2024-5-16 15:16 上傳
圖6 打印可穿戴式無人機無線遙控裝置
2. 總結與展望
總之,本研究報告了利用可打印的聚電解質彈性體,通過基于 DLP 的多材料三維打印技術制造出的多種能夠進行多模式傳感的離子電子傳感器。聚電解質彈性體沒有泄漏,因此傳感器具有非凡的長期穩(wěn)定性。多材料三維打印技術使傳感器的結構設計具有很高的靈活性,能夠感應不同的機械刺激,無論是單獨感應還是組合感應,都不會產生信號串擾。本研究演示了一個為無人機集成了五個離子電子傳感器的可穿戴遙控裝置,這表明基于多材料三維打印聚電解質彈性體的可拉伸離子電子技術在各個領域的各種應用具有巨大潛力。
文章來源:
https://doi.org/10.1038/s41467-023-40583-5
|  收藏
收藏 轉播
轉播 支持
支持 反對
反對









 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351