��(l��i)Դ�� ̼�w�S����(x��)��
�������죨AM�����g(sh��)���J(r��n)����һ�N�ɿ�����(chu��ng)�µ����칤ˇ����ͨ�^(gu��)���ӳ��e�ķ�ʽֱ�ӏ�Ӌ(j��)��C(j��)�o���O(sh��)Ӌ(j��)��CAD��ģ���������S�M�����@�N�����܉����a(ch��n)���������ε�����͏�(f��)�s���Πͬ�r(sh��)Ҳ�������ʹ�Â��y(t��ng)�����o(w��)������Ķ��ƻ��ΉK���p���ٻ����ϽM����AM���g(sh��)��������(y��u)��(sh��)��������ģ�߳ɱ����p��?g��u)U�ϡ��s���������ڡ���߽M���|(zh��)����������`���ԡ����ߵ���s���ʡ����õęC(j��)е���ܡ��᷀(w��n)�����Լ���(du��)�h(hu��n)��Ӱ��^С��
�B�m(x��)�w�S����(qi��ng)�ۺ����(f��)�ϲ��ϣ�CFRP���������p�|(zh��)���߱ȏ�(qi��ng)�Ⱥ�ģ�����c���y(t��ng)���ٺͺϽ���ȣ�����܇�����պͺ����I(l��ng)��õ��ˏV����(y��ng)�á��������켼�g(sh��)�İl(f��)չ���O(sh��)Ӌ(j��)����������ܡ��ͳɱ��ď�(f��)�s��(f��)�ϽY(ji��)��(g��u)�ṩ���µĿ��ܡ�
������CFRP�r(sh��)��AM�^(gu��)�̵IJ���(w��n)���Կ��܌�(d��o)���������������F(xi��n)�ߴ粻��(zh��n)�_�͙C(j��)е���ܲ�Ȇ�(w��n)�}���@Щ��(w��n)�}����Դ���w�S�c��֮֬�g��ճ�ӡ��ֲ�ȱ�ݷֲ������w�S����ĥ�p���e(cu��)λ���Լ��ضȷֲ�����ˣ��l(f��)չԭλ�O(ji��n)�y(c��)�����m��(y��ng)����ϵ�y(t��ng)��(du��)��δ��(l��i)��AM�^(gu��)�����P(gu��n)��Ҫ��
���˴_�����첿���Ĝ�(zh��n)�_�Ժ�������|(zh��)�����������I(y��)��W(xu��)�o(w��)��ϵ�y(t��ng)�о������������I(y��)��W(xu��)��(gu��)�� IJR �����O(sh��)Ӌ(j��)�c�����������ĺ��������I(y��)��W(xu��)�������������c��(chu��ng)���O(sh��)Ӌ(j��)���Ų����c(di��n)��(sh��)�(y��n)�ҵ��о��ˆT�������һ�N���ڶ��������ںϵ��ھ��O(ji��n)�y(c��)�����m��(y��ng)���Ʒ�����
����ͨ�^(gu��)�A(y��)�y(c��)���{(di��o)��AM�^(gu��)���е�CFRP��ˇ����(sh��)����������������ҕ�X(ju��)���C(j��)�͟����C(j��)��(l��i)�@ȡ�����^(gu��)���еĶ�����̖(h��o)����(sh��)�F(xi��n)������֪���J(r��n)֪�͛Q�ߡ�ͨ�^(gu��)�����ֲ�ȱ���c����������֮�g�Ķ����P(gu��n)ϵ��ָ��(d��o)�]�h(hu��n)�{(di��o)���ěQ���ƶ������⣬߀��(g��u)���˽�(j��ng)�(y��n)����ģ�ͣ��A(y��)�y(c��)�w�S���e(cu��)λ�cݔ��?y��n)��?sh��)֮�g���P(gu��n)ϵ�����x��ضȲ�ͽ��|���������������
�������
ʹ������������ҕ�X(ju��)���C(j��)�͟����C(j��)��(l��i)�@ȡ�����^(gu��)���еĶ�����̖(h��o)����(sh��)�F(xi��n)������֪���J(r��n)֪�͛Q�ߡ�
�����˾ֲ�ȱ���c����������֮�g�Ķ����P(gu��n)ϵ����ָ��(d��o)�]�h(hu��n)�{(di��o)���ěQ���ƶ���
��(g��u)���˽�(j��ng)�(y��n)����ģ�ͣ��A(y��)�y(c��)�w�S�����e(cu��)λ�cݔ��?y��n)��?sh��)֮�g���P(gu��n)ϵ�����x��ضȲ�ͽ��|���������������
��Y(ji��)����
�����һ�N�µĿ�ܣ�ͨ�^(gu��)��(sh��)��(j��)����(qi��ng)��֪�R(sh��)��(k��)�Ͷ��������ںρ�(l��i)����(qi��ng)AM�^(gu��)�̵ķ�(w��n)���Ժ����첿�����|(zh��)����
�_�l(f��)��һ��(g��)��(sh��)��(j��)-����-�Q�߶༉(j��)�ںϷ������Ԍ�(sh��)�F(xi��n)�^(gu��)�̙C(j��)�Ƶ��R(sh��)�e���^(gu��)�̴��ڵĴ_���Լ����ھ����������ṩ�Q�ߘ�(bi��o)��(zh��n)��
ͨ�^(gu��)��(du��)���Ͱ����о����u(p��ng)�����C��������������m��(y��ng)����ϵ�y(t��ng)�Ŀ����ԺͿɿ��ԣ�������������(f��)�ϲ��ϽY(ji��)��(g��u)���|(zh��)����
�о��Y(ji��)Փ
ͨ�^(gu��)���������ںϺͽ�(j��ng)�(y��n)����ģ�͌�(sh��)�F(xi��n)�ěQ�ߣ��������CFRP�M��ͨ�^(gu��)AM������|(zh��)��������߀�ᵽ���@�(xi��ng)���������������ṩ��һ�N�µĶ��������ںϲ��ԣ����ИO��ĝ�����(l��i)���Ƹ��NAM�^(gu��)�̵��|(zh��)�����ơ�
�о��Y(ji��)���ԡ�Autonomous intelligent additive manufacturing of continuous fiber-reinforced composites: data-enhanced knowledgebase and multi-sensor fusion���l(f��)���ڡ�Virtual and Physical Prototyping���ڿ��ĵ�19����1���ϣ��� Lu Lu, Yongtang Yuan, Yongkang Xie, Shangqin Yuan, Jingwen Song, Han Luo, Yamin Li, Jihong Zhu �� Weihong Zhang ��ͬ����
DOI��10.1080/17452759.2024.2412192���l(f��)��r(sh��)�g��2024��10��16�ա�

640.jpg (196.65 KB, ���d��(sh��): 30)
���d����
2024-10-22 13:26 �ς�
���D1. ���ڶ�����AM��CFRP��������ϵ�y(t��ng)�Ĕ�(sh��)��(j��)-����-�Q�߶༉(j��)�ںϿ�ܣ�
640-1.jpg (116.22 KB, ���d��(sh��): 32)
���d����
2024-10-22 13:26 �ς�
���D2. �����^(gu��)���й�ˇ����(sh��)���x�����ھ��]�h(hu��n)�{(di��o)����ܣ�
640-2.jpg (77.43 KB, ���d��(sh��): 34)
���d����
2024-10-22 13:26 �ς�
���D3. ���ÃɷN����ģʽ��(l��i)�(y��n)�C�]�h(hu��n)���ƿ�ܵ���Ч�ԡ���a������ģʽ����b������ģʽ���B�m(x��)����·������c��С�͟o(w��)�˙C(j��)��ܡ���d���o(w��)�˙C(j��)��ܵ��B�m(x��)·���ʹ�ӡ�ٶ�ӳ�䡣���ÃɷN����ģʽ��(l��i)�(y��n)�C�]�h(hu��n)���ƿ�ܵ���Ч�ԡ���a������ģʽ����b������ģʽ���B�m(x��)����·������c��С�͟o(w��)�˙C(j��)��ܡ���d���o(w��)�˙C(j��)��ܵ��B�m(x��)·���ʹ�ӡ�ٶ�ӳ�䣩
640-3.jpg (98.71 KB, ���d��(sh��): 39)
���d����
2024-10-22 13:26 �ς�
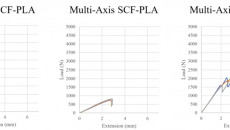
���D8. (a) ��ˇ����(sh��)���D(zhu��n)�Ǻ�LoM֮�g�P(gu��n)ϵ�ĵ���·����(b) AM ����� CFRP �ĈD����V��6 ����/�룻T��215��C��L��0.60 ���ף�E��11 ����/�룩��
640-4.jpg (61.37 KB, ���d��(sh��): 40)
���d����
2024-10-22 13:26 �ς�
���D15. �ھ���������ϵ�y(t��ng)ʾ��D��
640-5.jpg (30.43 KB, ���d��(sh��): 41)
���d����
2024-10-22 13:26 �ς�
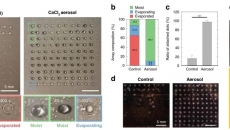
���D17. С�͟o(w��)�˙C(j��)��ܵ��ھ�����(sh��)�A(y��)�y(c��)���]�h(hu��n)��������a��ͨ�^(gu��)�O(ji��n)�y(c��)���{(di��o)����ӡ�ٶȡ���b��ͨ�^(gu��)�O(ji��n)�y(c��)��Tֵ���{(di��o)���ֲ��Ӻ�ȣ����������Ӄ�(n��i)CFRP��(f��)�ϲ��ϵ�ĥ�p��
| 








 �ղ�
�ղ� �D(zhu��n)��
�D(zhu��n)�� ֧��
֧�� ����(du��)
����(du��)
 �����W(w��ng)����11010802043351
�����W(w��ng)����11010802043351