來(lái):GK綠鑰生物科技
香港中文大學(xué)朱建教授團(tuán)隊(duì)在《Advanced Science》期刊上發(fā)表文章“Fully 3D-Printed Soft Capacitive Sensor of High Toughness and Large Measurement Range”。軟電容傳感器因其高靈敏度而廣泛應(yīng)用于可穿戴設(shè)備、柔性電子產(chǎn)品和軟機(jī)器人等領(lǐng)域。然而,由于它們的界面韌性低,可能會(huì)發(fā)生分層或脫粘。此外,由于剛度變化范圍有限,它們通常表現(xiàn)出較小的測(cè)量范圍。該研究利用定制的多材料3D打印機(jī)開(kāi)發(fā)了軟硅基電容式傳感器。通過(guò)同時(shí)固化有機(jī)硅材料,連續(xù)導(dǎo)電層和介電層獲得了1036 J·m−2的界面韌性。采用傾斜薄板介質(zhì)的傳感器在橫向和縱向上的界面韌性分別為645 J·m−2和339 J·m−2。此外,傳感器的測(cè)量范圍從0.85 Pa到5000 kPa。分離的傾斜薄板電介質(zhì)的顯著剛度變化促進(jìn)了這一擴(kuò)展范圍,范圍從0.56 kPa到19.76 MPa。因此,采用3D打印技術(shù)制造軟微結(jié)構(gòu)傳感器是一種通用的方法,不僅適用于提高軟傳感器的性能,而且有利于設(shè)計(jì)強(qiáng)大的軟功能器件。

640.jpg (78.83 KB, 下載次數(shù): 23)
下載附件
2025-1-14 14:46 上傳
WHAT-什么是軟電容傳感器?
軟電容式傳感器通常由夾在柔性電極之間的軟介電層組成,是一種基于電容變化原理的傳感器,主要用于感知壓力、觸摸、應(yīng)變等物理信號(hào)。與傳統(tǒng)硬質(zhì)傳感器不同,軟電容傳感器使用柔性材料(如導(dǎo)電聚合物、金屬納米線、碳納米管等)作為電極或電介質(zhì),使其具備更好的柔性和可變形能力。這些傳感器通過(guò)利用其可變形的材料和結(jié)構(gòu)來(lái)檢測(cè)施加的壓力或力。由于其有趣的屬性,包括良好的可重復(fù)性,低功耗,、功耗低、空間分辨率高和信號(hào)漂移小等優(yōu)點(diǎn),因此在可穿戴設(shè)備、人機(jī)界面、柔性電子設(shè)備、軟機(jī)器人等領(lǐng)域有著廣泛的應(yīng)用。
WHY-基于3D打印技術(shù)在制備軟電容傳感器上的優(yōu)勢(shì)是什么?
采用3D打印技術(shù)在構(gòu)建軟電容傳感器上的優(yōu)勢(shì)包括:1)高度自由的設(shè)計(jì)與制造:能夠通過(guò)數(shù)字化建模實(shí)現(xiàn)復(fù)雜幾何結(jié)構(gòu)的制造,包括多層、多孔、或梯度分布的結(jié)構(gòu);2)材料的多樣性和功能集成:支持多種柔性材料(如導(dǎo)電油墨、柔性聚合物、液態(tài)金屬等)的精確打印,且可以將不同的材料與復(fù)雜的結(jié)構(gòu)和強(qiáng)附著力結(jié)合在一起;3)可以實(shí)現(xiàn)微米甚至納米級(jí)的精度,使軟電容傳感器的關(guān)鍵部件(如介電層厚度、電極間距)達(dá)到精確控制。
HOW-如何實(shí)現(xiàn)全3D打印軟電容傳感器?
640-1.jpg (252.53 KB, 下載次數(shù): 26)
下載附件
2025-1-14 14:46 上傳
圖1 全3D打印軟電容式傳感器,韌性強(qiáng),測(cè)量范圍大
該研究開(kāi)發(fā)了一種定制的3D打印技術(shù),用于制造軟電容傳感器,并通過(guò)優(yōu)化材料和結(jié)構(gòu)設(shè)計(jì)提升其性能(圖1a)。該傳感器采用了創(chuàng)新的設(shè)計(jì):介電硅膠被傾斜排列形成薄板結(jié)構(gòu),夾在兩層平面導(dǎo)電硅膠之間(圖1b–d)。與傳統(tǒng)軟傳感器常見(jiàn)的分層和脫粘問(wèn)題不同,這種新型傳感器能夠有效避免這些缺陷,其導(dǎo)電和介電硅膠材料具有相似的剛度,從而增強(qiáng)了傳感器的可靠性。在3D打印過(guò)程中,導(dǎo)電和介電硅膠墨水保持未固化狀態(tài),有助于在電極和介電層之間形成強(qiáng)大的分子網(wǎng)絡(luò)和化學(xué)鍵,使得傳感器即使在扭曲或受壓時(shí),也能抵抗分層和脫粘(圖1f-g)。
實(shí)驗(yàn)表明,導(dǎo)電硅膠和介電硅膠的楊氏模量分別為840 kPa和580 kPa,界面韌性高達(dá)1039 J·m⁻²(圖1h)。此外,傳感器還具備從0.85 Pa到5000 kPa的廣泛測(cè)量范圍(圖1i),適用于各種實(shí)際應(yīng)用。最后,還展示了完全3D打印的智能鞋墊以及軟體機(jī)器人手(圖1j-k),為機(jī)器人和可穿戴設(shè)備的開(kāi)發(fā)提供了新的思路和可能。
640-2.jpg (265.82 KB, 下載次數(shù): 21)
下載附件
2025-1-14 14:46 上傳
圖2 可打印油墨的流變特性和全三維打印軟傳感器的界面特性
隨后,作者研究了用于3D打印軟電容傳感器的介電和電極硅膠墨水的特性及其打印效果。流變測(cè)試結(jié)果表明,所選用的墨水保證了打印形狀的穩(wěn)定性,并能在固化過(guò)程中承受自重并保持結(jié)構(gòu)完整性(圖2a-b)。此外,通過(guò)優(yōu)化打印參數(shù),實(shí)現(xiàn)了均勻且連續(xù)的墨水?dāng)D出(圖2c),并且能夠在不使用支撐材料的情況下直接打印自支撐的傾斜薄板結(jié)構(gòu)。研究表明,介電和導(dǎo)電硅膠的楊氏模量分別為840 kPa和580 kPa,且兩者均具有超過(guò)350%的斷裂伸長(zhǎng)率(圖2d)。隨后,通過(guò)三種類型的剝離測(cè)試,詳細(xì)分析了3D打印軟傳感器的界面性能(圖2e)。
結(jié)果顯示,連續(xù)打印的導(dǎo)電硅膠電極層(EL)之間的界面韌性為825 J·m−2,而介電硅膠層(DL)之間的界面韌性更高,為1365 J·m−2,表明DL層的界面粘結(jié)強(qiáng)度更強(qiáng)。此外,3D打印的EL和DL層組合的界面韌性為1039 J·m−2,顯著高于傳統(tǒng)鑄模法粘接的層(129 J·m−2)。這種提升表明,3D打印過(guò)程中未固化的導(dǎo)電和介電硅膠形成的分子網(wǎng)絡(luò)和化學(xué)鍵提高了界面韌性。為了增強(qiáng)靈敏度,采用多個(gè)分離的傾斜薄板介電層,導(dǎo)致傳感器在橫向和縱向表現(xiàn)出不同的界面韌性,分別為645 J·m−2和339 J·m−2(圖2f-i)。橫向剝離力呈現(xiàn)鋸齒狀變化,歸因于傾斜薄板的能量耗散特性。這種設(shè)計(jì)增強(qiáng)了界面韌性,提升了傳感器的整體性能和穩(wěn)定性。
640-3.jpg (182.95 KB, 下載次數(shù): 25)
下載附件
2025-1-14 14:46 上傳
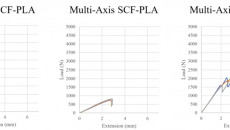
圖3 全3D打印軟傳感器大檢測(cè)范圍
接著,作者研究了具有多個(gè)分離傾斜薄板介電層的軟傳感器的壓敏性能(圖3a)。通過(guò)改變傾斜角度(α)、水平間距(d)和薄壁厚度(t)等結(jié)構(gòu)參數(shù),優(yōu)化了傳感器設(shè)計(jì)。實(shí)驗(yàn)結(jié)果表明,相較于固體電介質(zhì)傳感器,具有分離薄板介電層的傳感器表現(xiàn)出更高的靈敏度,特別是α=45°、d=1.5 mm、t=0.2 mm時(shí),靈敏度最高。進(jìn)一步分析表明,傳感器的壓縮應(yīng)力-應(yīng)變曲線表現(xiàn)出在不同應(yīng)變范圍內(nèi)的可變剛度(圖3b)。在小應(yīng)變范圍內(nèi),傳感器能夠感知0.85 Pa的微小壓力,而固體電介質(zhì)傳感器的檢測(cè)限為200 Pa。
薄板介電層的存在使得傳感器具有較低的壓縮模量,并且在較大應(yīng)變下,模量顯著增大,能夠承受更大的壓力(圖3d-f)。該結(jié)構(gòu)提供了在小應(yīng)變范圍內(nèi)高靈敏度,在大應(yīng)變范圍內(nèi)較大測(cè)量范圍的優(yōu)勢(shì)。進(jìn)一步實(shí)驗(yàn)驗(yàn)證了傳感器在高壓下的穩(wěn)定性。圖3g-h顯示,傳感器能夠在5000 kPa的壓力下穩(wěn)定工作,并在周期性壓力下表現(xiàn)出穩(wěn)定響應(yīng)。此外,傳感器具有高分辨率,能夠檢測(cè)到小幅度的壓力變化,且在20,000次循環(huán)測(cè)試中沒(méi)有明顯的信號(hào)變化(圖3i)。與其他軟電容傳感器相比,本文傳感器的檢測(cè)范圍更廣,能夠覆蓋從0.85 Pa到5000 kPa的壓力范圍(圖3j)。
640-4.jpg (188.91 KB, 下載次數(shù): 21)
下載附件
2025-1-14 14:46 上傳
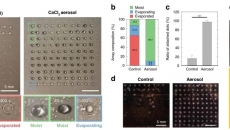
圖4 由軟壓力傳感器組成的全3D打印鞋墊
作者展示了一種完全3D打印的個(gè)性化鞋墊,用于實(shí)時(shí)壓力監(jiān)測(cè),并具有出色的耐久性,可承受10,000個(gè)循環(huán)。圖4a展示了該鞋墊的設(shè)計(jì),每個(gè)傳感器包括底部電極、多層分離的傾斜薄板介電層和頂部電極。傳感器被布置在前腳掌、中足和腳跟區(qū)域,組成一個(gè)16傳感器陣列(圖4b)。將鞋墊放入鞋中后,通過(guò)電容數(shù)字轉(zhuǎn)換器和多路復(fù)用器測(cè)量每個(gè)傳感器的電容,結(jié)果顯示所有傳感器表現(xiàn)一致,確保了精確的壓力監(jiān)測(cè)(圖4c-d)。在動(dòng)態(tài)實(shí)驗(yàn)中,傳感器鞋墊成功記錄了步態(tài)周期中的不同壓力變化,如腳跟、前腳掌和腳跟著地的壓力變化(圖4f-n)。
這些數(shù)據(jù)能夠用于足部姿勢(shì)分析,并生成相應(yīng)的壓力熱圖,有助于生物力學(xué)研究,發(fā)現(xiàn)異常壓力區(qū)域,設(shè)計(jì)針對(duì)性的干預(yù)措施。此外,在反復(fù)的復(fù)雜摩擦測(cè)試中,傳感器仍能保持穩(wěn)定信號(hào)輸出。即便在160 kPa的正常壓力和50 kPa的剪切力作用下,傳感器經(jīng)過(guò)10,000個(gè)循環(huán)后,電容變化幾乎沒(méi)有變化(圖4o-p)。3D打印的鞋墊在極端條件下表現(xiàn)出卓越的耐久性和穩(wěn)定性,得益于電介質(zhì)和導(dǎo)電硅膠之間較大的界面韌性。
640-5.jpg (201.58 KB, 下載次數(shù): 25)
下載附件
2025-1-14 14:46 上傳
圖5 結(jié)合軟致動(dòng)器和軟傳感器的全3D打印軟機(jī)器人手
最后,作者開(kāi)發(fā)了一種完全3D打印的軟體機(jī)器人手,通過(guò)軟氣動(dòng)驅(qū)動(dòng)器和軟傳感器實(shí)現(xiàn)精確控制(圖5a)。每根手指包含軟氣動(dòng)執(zhí)行器、電容觸覺(jué)傳感器和電阻彎曲傳感器,采用介電和導(dǎo)電硅膠材料,在一步打印過(guò)程中完成,無(wú)需后處理。優(yōu)化的打印參數(shù)確保了手指的結(jié)構(gòu)一致性,并避免了導(dǎo)電與介電材料的相互干擾(圖5b-d)。觸覺(jué)傳感器獨(dú)立于彎曲傳感器工作,可測(cè)量指尖的接觸力,而彎曲傳感器檢測(cè)手指的彎曲(圖5e)。結(jié)合觸覺(jué)傳感器,軟體機(jī)器人手可以實(shí)現(xiàn)實(shí)時(shí)閉環(huán)反饋控制,精確控制抓取力(圖5f-g)。此外,軟彎曲傳感器還可用于在虛擬現(xiàn)實(shí)中模擬手指的動(dòng)作,提供精準(zhǔn)的手勢(shì)模擬,廣泛應(yīng)用于醫(yī)療訓(xùn)練、元宇宙及人機(jī)交互中(圖5h-i)。
結(jié)論:綜上所述,該研究開(kāi)發(fā)了一種定制的多材料3D打印機(jī),可在單次打印中制造軟性硅膠電容傳感器。這些傳感器展現(xiàn)出優(yōu)異的界面韌性和伸展性,且具有寬廣的測(cè)量范圍(0.85 Pa-5000 kPa)。展示了兩種應(yīng)用:一是嵌入傳感器陣列的智能個(gè)性化鞋墊,能實(shí)時(shí)監(jiān)測(cè)足底壓力分布,且耐用性超過(guò)10,000個(gè)循環(huán);二是結(jié)合軟性驅(qū)動(dòng)器和傳感器的3D打印機(jī)器人手,能夠執(zhí)行反饋控制、姿態(tài)識(shí)別和物體抓取。因此,所開(kāi)發(fā)的3D打印軟傳感器的策略不僅提升了軟傳感器的性能,還促進(jìn)了堅(jiān)固軟功能設(shè)備的設(shè)計(jì),增強(qiáng)了軟體機(jī)器人在復(fù)雜環(huán)境中的執(zhí)行能力。
文章來(lái)源:https://doi.org/10.1002/advs.202410284
| 








 收藏
收藏 轉(zhuǎn)播
轉(zhuǎn)播 支持
支持 反對(duì)
反對(duì)
 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351