來源: 國際仿生工程學(xué)會
上海交通大學(xué)及江西科技師范大學(xué)聯(lián)合研究團(tuán)隊在《Nature Communications》期刊發(fā)表文章“Multimaterial cryogenic printing of three-dimensional soft hydrogel machines”,提出了一種多材料低溫打印(MCP)技術(shù),采用全低溫溶劑相變策略,包括瞬間墨水凝固,然后通過原位同步溶劑熔化和交聯(lián),能夠高保真度的制造具有高縱橫比復(fù)雜幾何形狀(懸垂、薄壁和空心)的各種多材料3D水凝膠結(jié)構(gòu),并使用該方法制造了具有多種功能的全打印全水凝膠軟機(jī)器。

640.jpg (125.31 KB, 下載次數(shù): 14)
下載附件
2025-2-7 10:21 上傳
該技術(shù)展示了具有集成制造多功能的全打印全水凝膠軟機(jī)器的能力,例如具有小葉狀態(tài)感知的自感知仿生心臟瓣膜和具有20個軟硬復(fù)合葉片的無繩磁渦輪機(jī)機(jī)器人。這種具有不同運(yùn)動模式(清掃和拖動)的渦輪機(jī)機(jī)器人進(jìn)一步提供了復(fù)雜管內(nèi)堵塞物清除和運(yùn)輸?shù)哪芰Α?br />
640-1.jpg (184.86 KB, 下載次數(shù): 22)
下載附件
2025-2-7 10:20 上傳
圖1 MCP打印技術(shù)用于軟體水凝膠機(jī)器
MCP技術(shù)利用全低溫溶劑相變策略通過兩個步驟制造多材料3D結(jié)構(gòu)水凝膠。第一步使用水到冰的瞬時相變來物理鎖定水凝膠前體的分子構(gòu)型,通過將低溫平臺與墨水直寫3D打印系統(tǒng)相結(jié)合,使多種水凝膠墨水在-30~-10°C的低溫范圍內(nèi)一體化按需打印凍結(jié),實(shí)現(xiàn)打印可定制化、高精度、自支撐的3D結(jié)構(gòu)。第二步利用反向冰-水相變以在融化的冰-水界面處引發(fā)冷凍水凝膠分子網(wǎng)絡(luò)的化學(xué)交聯(lián)。通過低溫打印過程的原位顯微鏡成像來監(jiān)測作者的MCP技術(shù)的動力學(xué),可以清楚地觀察到在剛剛擠出的細(xì)絲中具有通過水固化形成堅硬冰殼的結(jié)晶前沿。在掃描電子顯微鏡(SEM)圖像中,低溫打印的長絲顯示出均勻的微孔,而室溫打印的樣品顯示出分層多孔形態(tài)。與在各種打印動力學(xué)條件(如油墨流變學(xué)和基底)上的室溫打印相比,MCP技術(shù)的分辨率更高,且沒有顯著的性能劣化。接下來,作者驗(yàn)證了具有不同形成機(jī)制的水凝膠材料的多材料打印性能。打印的非均質(zhì)水凝膠的單軸拉伸測試表明,每個混合樣品在組成的均質(zhì)水凝膠本身處破裂,而不是在連接部分脫粘(圖2)。
640-2.jpg (208.42 KB, 下載次數(shù): 25)
下載附件
2025-2-7 10:20 上傳
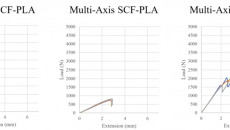
圖2 多材料低溫打印技術(shù)的特性
為了展示技術(shù)制造能力,作者設(shè)計打印了一系列具有懸垂、薄壁、空心特征的復(fù)雜結(jié)構(gòu),包括金字塔、Y形管道、空心立方體、體素化立方體、管內(nèi)支架與晶格超結(jié)構(gòu)。所制造結(jié)構(gòu)在拉伸、擠壓和扭轉(zhuǎn)等變形方面具有機(jī)械魯棒性,為軟體器件應(yīng)用提供了優(yōu)異的可靠性和耐久性。進(jìn)一步使用X射線計算機(jī)斷層掃描評估打印結(jié)構(gòu)的形狀保真度。以三維異質(zhì)晶格結(jié)構(gòu)為例,其斷層掃描切片顯示出均勻的毫米級壁厚和高保真中空結(jié)構(gòu)。通過點(diǎn)云重建與設(shè)計結(jié)構(gòu)定量比較,結(jié)果顯示其有68.3%的區(qū)域制造誤差小于227 μm,95.4%的區(qū)域制造誤差小于428 μm(圖3)。
640-3.jpg (196.11 KB, 下載次數(shù): 20)
下載附件
2025-2-7 10:20 上傳
圖3 打印結(jié)構(gòu)的表征
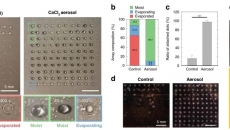
作者設(shè)計和制造了具有小葉狀態(tài)感知的全水凝膠仿生主動脈心臟瓣膜。打印的瓣膜顯示出與本地青少年心臟瓣膜相似的尺寸,表面輪廓誤差小于6%,最大表面傾斜度為43.7°。在模擬的收縮和舒張周期中,瓣葉順應(yīng)性地響應(yīng)跨瓣血流并引起腔室壓力的變化。實(shí)驗(yàn)觀察證實(shí),其承受能力可超過140 mmHg,覆蓋自體主動脈血壓的正常范圍(圖4)。
640-4.jpg (140.09 KB, 下載次數(shù): 19)
下載附件
2025-2-7 10:20 上傳
圖4 自感知仿生心臟瓣膜
為了進(jìn)一步展示多功能軟機(jī)器,作者連續(xù)打印多種材料組件,以制造具有可定制尺寸(通常直徑約為12.5 mm)的無系繩多模磁性渦輪機(jī)機(jī)器人。在外部旋轉(zhuǎn)磁場激勵下,機(jī)器人的磁性平臺帶動渦輪葉片形成旋轉(zhuǎn)清掃運(yùn)動。其中,葉片軟部能夠順應(yīng)性錨定目標(biāo)位置,而硬部則可產(chǎn)生扭矩和推進(jìn)力。與此同時,旋轉(zhuǎn)渦輪葉片可以擾動水下管內(nèi)流場,在其身后形成捕獲渦旋以實(shí)現(xiàn)目標(biāo)物體的拖曳運(yùn)動。所設(shè)計的小型渦輪軟體機(jī)器人具有兩種運(yùn)動模式:葉片旋轉(zhuǎn)清掃和捕獲渦旋拖曳。通過反轉(zhuǎn)旋轉(zhuǎn)磁場方向使渦輪機(jī)器人翻轉(zhuǎn)(面對或背對目標(biāo)物體),能夠?qū)崿F(xiàn)機(jī)器人多運(yùn)動模式切換。例如,清除水下直管中的粘性堵塞并捕獲漂浮障礙物,以避免堵塞遷移;通過轉(zhuǎn)向旋轉(zhuǎn)磁場導(dǎo)航,渦輪機(jī)器人運(yùn)輸膠囊狀貨物通行復(fù)雜Y形管道等(圖5)。
640-5.jpg (176.49 KB, 下載次數(shù): 15)
下載附件
2025-2-7 10:21 上傳
圖5 無系繩多模式磁渦輪機(jī)機(jī)器人
總結(jié):在這項研究中,作者提出了一種多材料低溫打印技術(shù),利用全低溫溶劑相變策略進(jìn)行全3D水凝膠制造。開發(fā)的技術(shù)平臺展示了構(gòu)建的多材料3D水凝膠架構(gòu)具有多樣性和幾何復(fù)雜性的能力,并在全打印全水凝膠軟機(jī)器上的演示中探索了軟機(jī)器人和生物醫(yī)學(xué)電子學(xué)的廣闊前景。
原文鏈接:https://doi.org/10.1038/s41467-024-55323-6
| 

 收藏
收藏 轉(zhuǎn)播
轉(zhuǎn)播 支持
支持 反對
反對







 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351