|
2025年2月18日,,南極熊獲悉,,特溫特大學(xué)(UT) 和南丹麥大學(xué)(SDU)的研究人員想出了一個(gè)巧妙的方法來加強(qiáng)混合機(jī)器人中軟材料和剛性材料之間的聯(lián)系,,這是機(jī)器人技術(shù)領(lǐng)域的一個(gè)持續(xù)挑戰(zhàn)。
有趣的是,,他們的方法將日常FDM打印過程中常遇到的“擠壓不足”問題轉(zhuǎn)化為優(yōu)勢,。通過故意讓打印機(jī)創(chuàng)建多孔結(jié)構(gòu),他們找到了一種提高材料間粘合性的方法,。此外,,這種方法適用于標(biāo)準(zhǔn)熔融沉積成型 (FDM) 打印機(jī),因此比需要昂貴的多材料打印機(jī)的現(xiàn)有解決方案更容易使用,。

1.png (921.12 KB, 下載次數(shù): 4)
下載附件
2025-2-18 22:13 上傳
△仿生混合夾鉗模仿人類指甲,,其特點(diǎn)是剛性指甲板粘合在多孔網(wǎng)上,復(fù)制了指甲和甲床之間的天然粘合,。圖片來自 UT
相關(guān)研究以題為 “Bio-inspired 3D printing approachfor bonding soft and rigid materials through underextrusion”的論文發(fā)表在《自然》雜志上,,作者包括南達(dá)科他大學(xué)的研究人員 Arman Goshtasbi、德克薩斯大學(xué)的 Luca Grignaffini 和 Ali Sadeghi,。
1.jpg (59.12 KB, 下載次數(shù): 4)
下載附件
2025-2-18 22:13 上傳
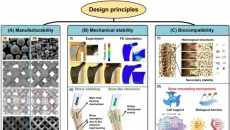
模仿自然來增強(qiáng)機(jī)器人技術(shù)
機(jī)器人中的軟部件和硬部件各有優(yōu)勢,,但如何讓它們正確粘合一直是一件棘手的事情。這些材料處理應(yīng)力的方式不同,,這往往會(huì)導(dǎo)致粘合力較弱,,而傳統(tǒng)的粘合方法(如粘合劑)在機(jī)械應(yīng)變下會(huì)成為失效點(diǎn)。
然而,,大自然提供了一種解決方案,。就像生物結(jié)締組織無縫連接肌肉和骨骼一樣,研究人員開發(fā)出了一種纖維狀多孔結(jié)構(gòu),,可以加強(qiáng)軟質(zhì)和硬質(zhì)材料之間的連接,。
這種方法反映了肌腱、韌帶和其他自然界面如何分配壓力,,從而防止突然的機(jī)械故障,。通過嚴(yán)格的測試,他們微調(diào)了實(shí)現(xiàn)強(qiáng)度和靈活性最佳平衡所需的孔隙率,,標(biāo)志著仿生機(jī)器人技術(shù)向前邁進(jìn)了一步,。
數(shù)字說明了一切。在搭接剪切和剝離測試中,,這種方法比傳統(tǒng)粘合劑的性能高出 200%,。使用 Ecoflex 00-10 和 DragonSkin 10 硅橡膠進(jìn)行的實(shí)驗(yàn)表明,與常用粘合劑相比,,粘合力明顯更強(qiáng),,使軟機(jī)器人具有更好的耐用性。
對于氣動(dòng)軟機(jī)器人而言,,氣密密封至關(guān)重要,,該方法也顯示出了良好的效果,。在模擬壓力條件下,使用該技術(shù)形成的粘合力比使用粘合劑粘合的粘合力高出三倍,,增強(qiáng)了其在充氣和混合機(jī)器人系統(tǒng)中的潛力,。
通過提供一種簡單,、低成本的方式來在不同材料之間建立牢固的結(jié)合,,這種方法可以改變混合機(jī)器人的制造方式。應(yīng)用可以擴(kuò)展到任何機(jī)械可靠性至關(guān)重要的環(huán)境,,為軟機(jī)器人開辟新的可能性,。
據(jù)研究人員稱,未來的工作可能會(huì)探索通過模仿自然界軟硬材料之間的逐漸過渡來進(jìn)一步完善這項(xiàng)技術(shù)的方法,。使用 ABS 和 PETG 等替代 3D 打印材料進(jìn)行測試也可以揭示使粘合力更強(qiáng)的方法,。
2.png (368.15 KB, 下載次數(shù): 4)
下載附件
2025-2-18 22:13 上傳
△搭接剪切和剝離試驗(yàn)結(jié)果。圖片來自 UT
仿生機(jī)器人研究
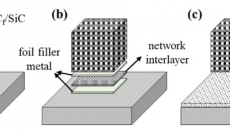
過去,,3D 打印已為多種獨(dú)特的仿生機(jī)器人的開發(fā)做出了貢獻(xiàn),。加州大學(xué)圣地亞哥分校的研究人員做出了一項(xiàng)顯著貢獻(xiàn),他們介紹了一種更經(jīng)濟(jì)的3D 打印軟體昆蟲機(jī)器人的方法,。他們的柔性骨架打印方法可與標(biāo)準(zhǔn) FDM 打印機(jī)配合使用,,將剛性細(xì)絲層疊在加熱的熱塑性基座上。
Insect-robots-1.png (338.1 KB, 下載次數(shù): 4)
下載附件
2025-2-18 22:13 上傳
柔性骨骼制造技術(shù)靈感來自昆蟲的外殼,。圖片來自 Soft Robotics
這種方法簡化了生產(chǎn),,無需昂貴的多材料 3D 打印,使軟機(jī)器人更容易實(shí)現(xiàn),。該技術(shù)從昆蟲外骨骼中汲取靈感,,平衡了靈活性和結(jié)構(gòu)支撐。在測試中,,打印的機(jī)器人表現(xiàn)出了更好的強(qiáng)度和耐用性,,原型成功自行行走。
2022 年,,薩里大學(xué)的一名學(xué)生開發(fā)了一款3D 打印機(jī)器魚,,用于從水道中收集微塑料。這款名為 Gillbert 的機(jī)器人由埃莉諾·麥金托什于 2022 年發(fā)明,,具有鰓狀結(jié)構(gòu)和細(xì)網(wǎng),,可捕獲小至兩毫米的塑料顆粒,同時(shí)允許水通過,。
這款設(shè)計(jì)贏得了2022 年自然機(jī)器人大賽,,并在實(shí)驗(yàn)室環(huán)境和英國湖泊中成功進(jìn)行了測試。當(dāng)時(shí),,它是遠(yuǎn)程控制的,,未來計(jì)劃包括提高其游泳速度和自主性,。
| 








 收藏
收藏 轉(zhuǎn)播
轉(zhuǎn)播 支持
支持 反對
反對
 京公網(wǎng)安備11010802043351
京公網(wǎng)安備11010802043351